第1页 / 共52页
第2页 / 共52页
第3页 / 共52页
第4页 / 共52页
第5页 / 共52页
第6页 / 共52页
第7页 / 共52页
第8页 / 共52页
试读已结束,还剩44页,您可下载完整版后进行离线阅读
基于ABB工业机器人的现场应用编程此内容为付费资源,请付费后查看
黄金会员免费砖石会员免费
付费资源
© 版权声明
文章版权归作者所有,未经允许请勿转载。
THE END
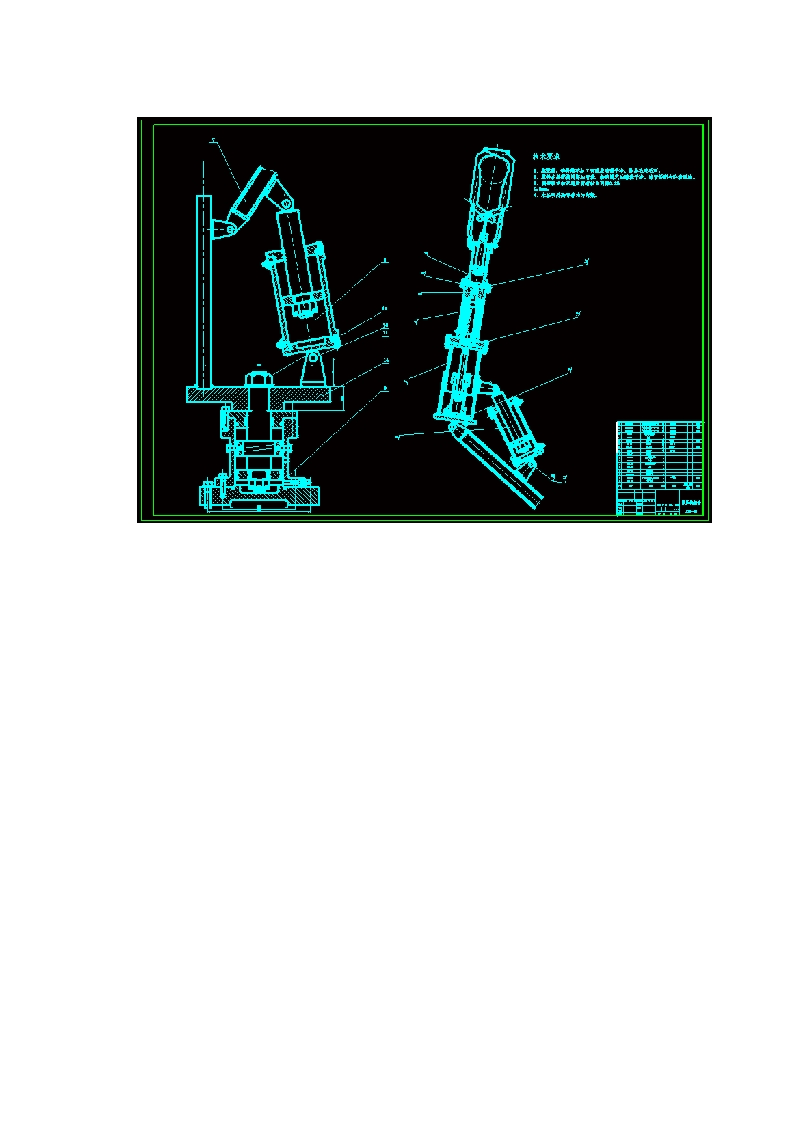
自由度机械臂、IRC5控制器三部分组成,用户编程系统核心的用户编程语言和编程语言解释器或编译器可以根据需要来进行自主设计和开发。而在主开发用户编程语言集合的过程中,开发人员则可以根据自身特点、实际需要以及用户要求,在实现最基本的工业ABB机器人用户编程指令,例如,运动控制指令和I0控制指令的同时,增加相应功能的用户编程指令来实现个性化定制的用户编程语言,以便用户编程系统实现多样化,从而提高用户编程系统的灵活性,使其能够适应复杂多变的市场需求。以ABB为基础,以运动控制为核心设计开发工业ABB机器人编程控制系统,通过采用系统化思维、模块化设计以及先进的计算机技术和编程理念,探索实现高效合理的控制系统体系结构和简明易用的用户编程系统。关键词:机械手;液压缸;液压传动:活塞

















暂无评论内容