
第1页 / 共24页
第2页 / 共24页
第3页 / 共24页
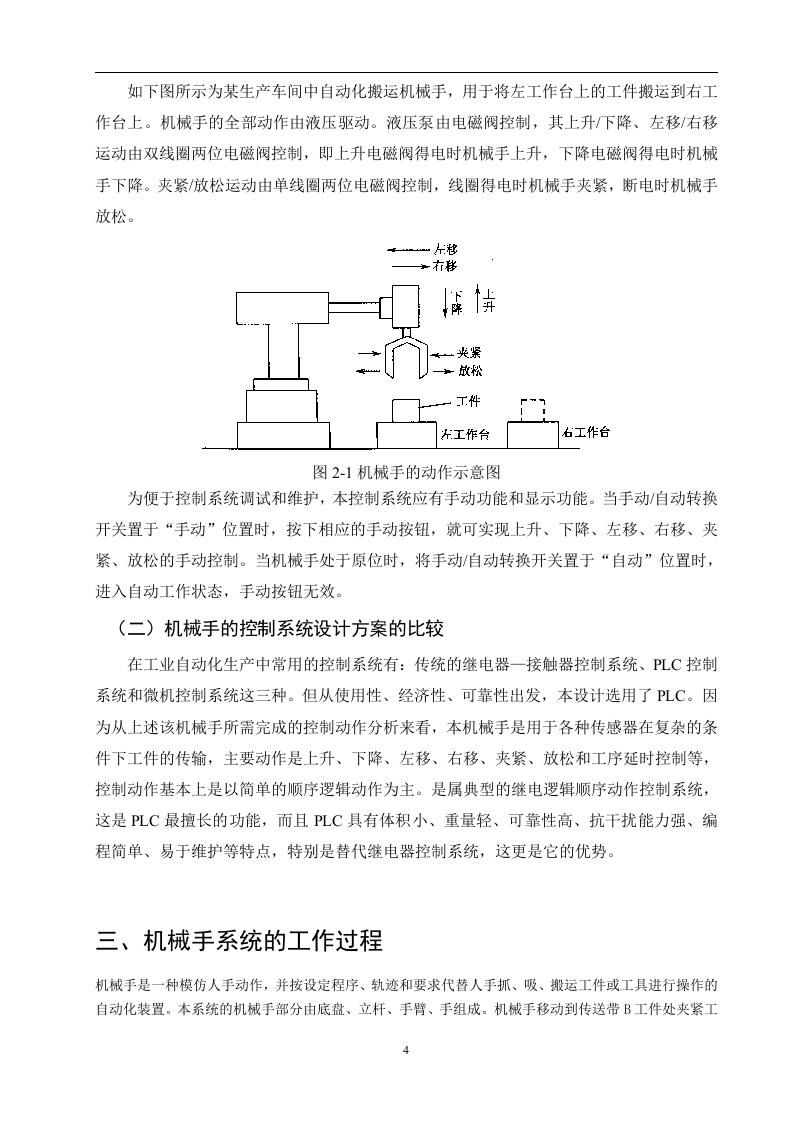
第4页 / 共24页
第5页 / 共24页
第6页 / 共24页
第7页 / 共24页
第8页 / 共24页
试读已结束,还剩16页,您可下载完整版后进行离线阅读
PLC对搬运机械手的控制此内容为付费资源,请付费后查看
黄金会员免费砖石会员免费
付费资源
© 版权声明
文章版权归作者所有,未经允许请勿转载。
THE END
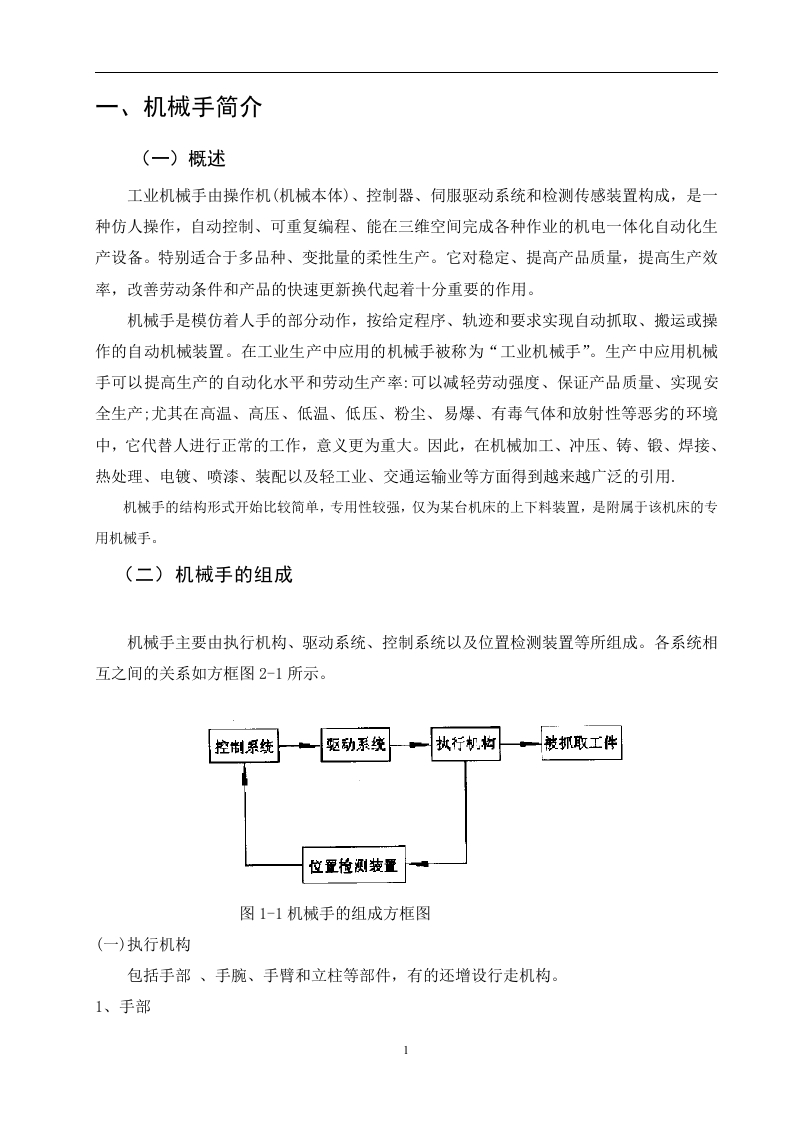
一、机械手简介(一)概述工业机械手由操作机(机械本体)、控制器、伺服驱动系统和检测传感装置构成,是一种仿人操作,自动控制、可重复编程、能在三维空间完成各种作业的机电一体化自动化生产设备。特别适合于多品种、变批量的柔性生产。它对稳定、提高产品质量,提高生产效率,改善劳动条件和产品的快速更新换代起着十分重要的作用。机械手是模仿着人手的部分动作,按给定程序、轨迹和要求实现自动抓取、搬运或操作的自动机械装置。在工业生产中应用的机械手被称为“工业机械手”。生产中应用机械手可以提高生产的自动化水平和劳动生产率:可以减轻劳动强度、保证产品质量、实现安全生产:尤其在高温、高压、低温、低压、粉尘、易爆、有毒气体和放射性等恶劣的环境中,它代替人进行正常的工作,意义更为重大。因此,在机械加工、冲压、铸、锻、焊接、热处理、电镀、喷漆、装配以及轻工业、交通运输业等方面得到越来越广泛的引用机械手的结构形式开始比较简单,专用性较强,仅为某台机床的上下料装置,是附属于该机床的专用机械手。(二)机械手的组成机械手主要由执行机构、驱动系统、控制系统以及位置检测装置等所组成。各系统相互之间的关系如方框图2-1所示。控制系统甄动系统执行机构被抓取工件位理检测装置图1-1机械手的组成方框图(一)执行机构包括手部、手腕、手臂和立柱等部件,有的还增设行走机构。1、手部

















暂无评论内容