主要内容
预览文档 文档类型: 本科毕业论文
适用人群: 水产养殖从业者、自动化设备研发人员、机械设计及自动化专业学生
文档可解决的实际问题:
当前水产养殖中“倒池”(将养殖对象从一个网箱转移至另一个网箱)主要依赖人工操作,耗费大量人力物力且效率低下。本论文设计的基于PLC的养殖网箱机械手抓取控制系统,可替代人工完成网箱抓取与转移作业,显著提升生产效率、降低劳动强度,并减少对水生生物的损伤。
核心内容概述:
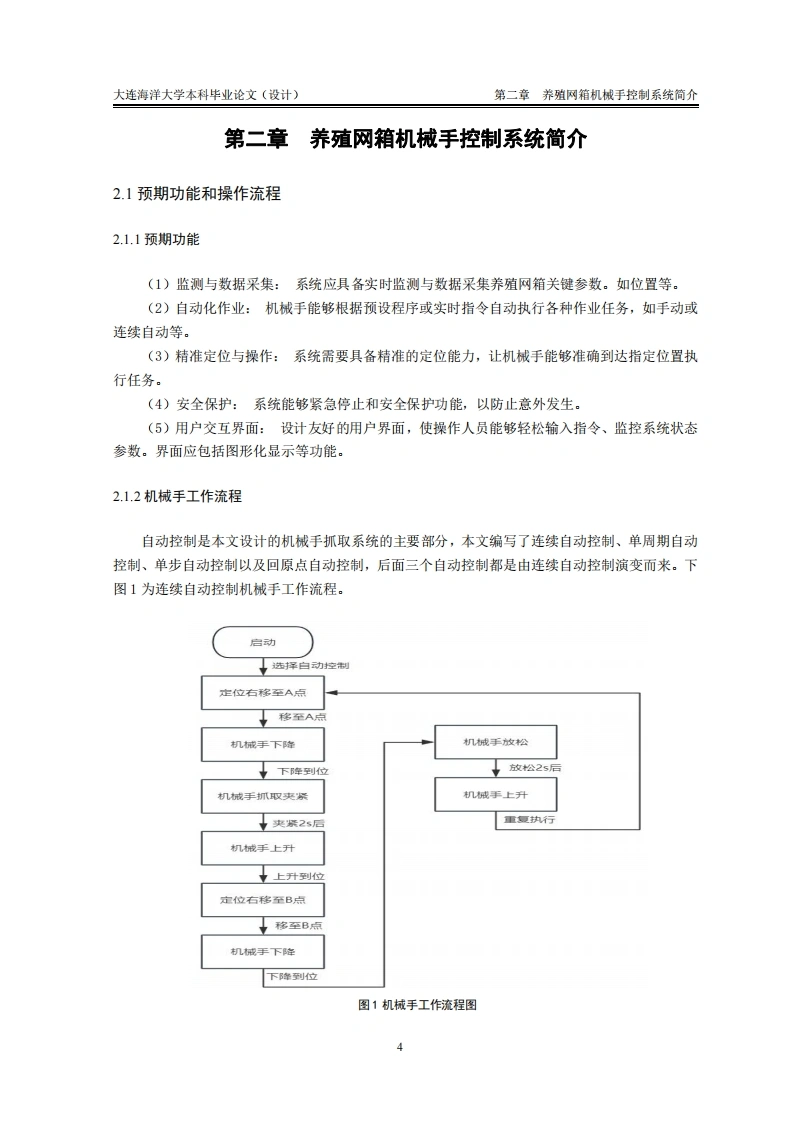
论文围绕养殖网箱机械手抓取控制系统的完整设计展开。硬件部分包括机械手结构、视觉传感器(用于监测网箱位置)及执行器(控制机械手运动);软件部分以PLC为核心控制器,将控制程序划分为五种工作模式,增强了系统在实际场景中的适用性。系统设计涵盖主电路图、输入输出点分配、PLC接线图以及网箱识别与定位方案。控制程序需求分析后绘制了流程图,并完成了梯形图等程序设计。仿真实验通过组态动画环境设置与参数设定,验证了系统的可行性与稳定性。
关键结论与数据:
系统采用PLC技术结合视觉传感器与执行器,构建了完整的自动化抓取控制方案。
控制程序分为五种模式,大幅提升了系统在不同养殖场景下的灵活性与实用性。
仿真实验结果表明,该设计能够有效替代人工倒池操作,提高养殖效率并降低人工成本。
文档价值总结:
本论文为自动化养殖技术提供了切实可行的解决方案,有助于推动水产养殖业向智能化、自动化方向升级,对提升行业生产效率和经济效益具有重要参考意义。
适用人群: 水产养殖从业者、自动化设备研发人员、机械设计及自动化专业学生
文档可解决的实际问题:
当前水产养殖中“倒池”(将养殖对象从一个网箱转移至另一个网箱)主要依赖人工操作,耗费大量人力物力且效率低下。本论文设计的基于PLC的养殖网箱机械手抓取控制系统,可替代人工完成网箱抓取与转移作业,显著提升生产效率、降低劳动强度,并减少对水生生物的损伤。
核心内容概述:
论文围绕养殖网箱机械手抓取控制系统的完整设计展开。硬件部分包括机械手结构、视觉传感器(用于监测网箱位置)及执行器(控制机械手运动);软件部分以PLC为核心控制器,将控制程序划分为五种工作模式,增强了系统在实际场景中的适用性。系统设计涵盖主电路图、输入输出点分配、PLC接线图以及网箱识别与定位方案。控制程序需求分析后绘制了流程图,并完成了梯形图等程序设计。仿真实验通过组态动画环境设置与参数设定,验证了系统的可行性与稳定性。
关键结论与数据:
系统采用PLC技术结合视觉传感器与执行器,构建了完整的自动化抓取控制方案。
控制程序分为五种模式,大幅提升了系统在不同养殖场景下的灵活性与实用性。
仿真实验结果表明,该设计能够有效替代人工倒池操作,提高养殖效率并降低人工成本。
文档价值总结:
本论文为自动化养殖技术提供了切实可行的解决方案,有助于推动水产养殖业向智能化、自动化方向升级,对提升行业生产效率和经济效益具有重要参考意义。
第1页 / 共33页
第2页 / 共33页

第3页 / 共33页
第4页 / 共33页
第5页 / 共33页
第6页 / 共33页
第7页 / 共33页
试读已结束,还剩26页,您可下载完整版后进行离线阅读
付费资源
© 版权声明
文章版权归作者所有,未经允许请勿转载。
THE END








项目总承包管理组织方案-c9a0040014-docx-1.webp)

暂无评论内容