第1页 / 共27页
第2页 / 共27页
第3页 / 共27页
第4页 / 共27页
第5页 / 共27页
第6页 / 共27页
第7页 / 共27页
第8页 / 共27页
试读已结束,还剩19页,您可下载完整版后进行离线阅读
付费资源
© 版权声明
文章版权归作者所有,未经允许请勿转载。
THE END
文档类型:学术论文
适用人群:机械设计工程师、机器人研发人员、自动化设备研究人员、机械工程专业学生
文档核心内容:
该论文围绕码垛装箱机器人的结构设计展开,针对国内码垛机器人依赖进口技术的现状,提出一种实用型六自由度码垛搬运机器人的开发方案。研究基于人体手臂的结构特征,运用机器人机构学与工业机器人设计方法,确定了机器人各组成单元的自由度与关节尺寸,并完成了各部件设计。通过三维设计软件SolidWorks建立了完整的机器人物理模型。论文旨在打破国外技术垄断,提升国产码垛机器人在物料搬运领域的市场竞争力。
可解决的实际问题:
该设计可直接应用于制药、石化等行业中物料的码垛与搬运场景,解决国内企业长期依赖进口码垛机器人导致的技术受制、成本高昂等问题。通过自主结构设计,降低设备采购与维护成本,同时为后续机器人运动学分析、动力学仿真及控制系统开发提供基础模型。
正文内容:
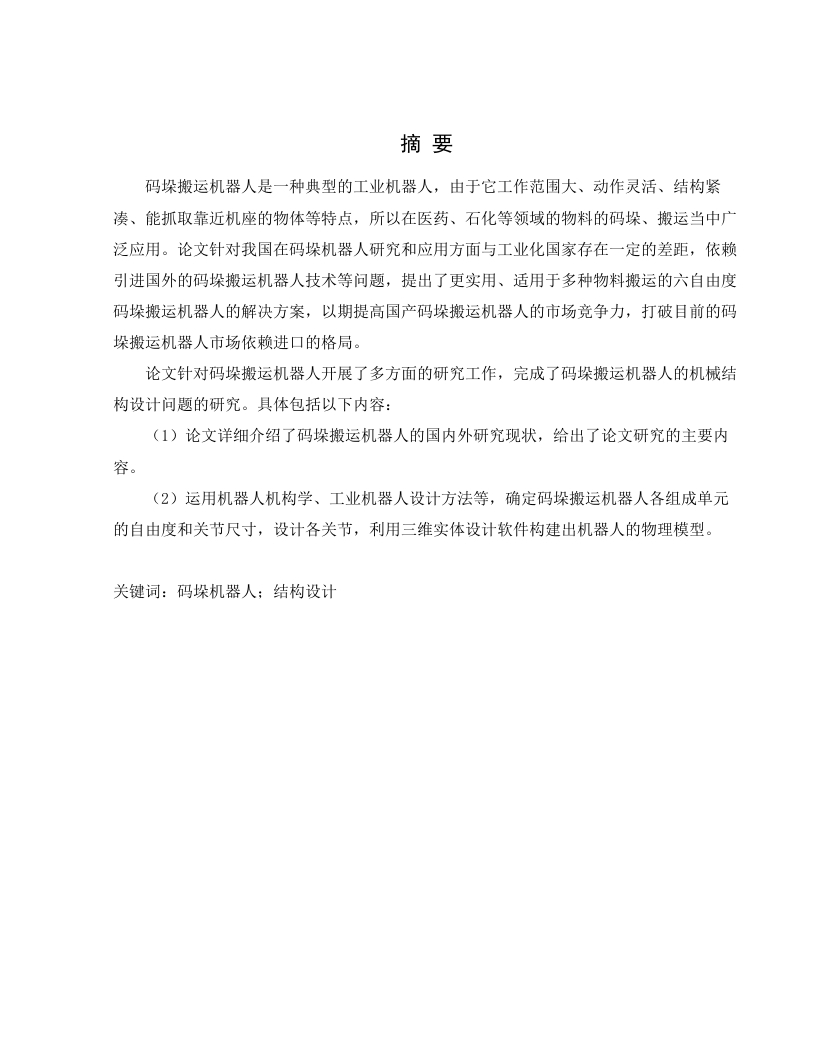
码垛装箱机器人作为典型工业机器人,凭借其工作范围广、运动灵活、结构紧凑以及能够抓取机器底座附近物体等优势,在制药、石化等行业的物料码垛与搬运中得到了广泛应用。然而,国内码垛机器人技术长期依赖国外进口,自主研发与应用水平与工业化国家存在明显差距。针对这一现状,论文提出了一种六自由度码垛搬运机器人的结构设计方案,旨在开发适用于多种物料搬运设备的实用型机器人,从而打破进口依赖格局,提升国产设备的市场竞争力。
研究过程中,设计者借鉴了人体手臂的结构特征,利用机器人机构学原理和工业机器人设计方法,系统确定了码垛机器人各组成单元的自由度数量与关节尺寸参数。在此基础上,对每个部件进行了详细的结构设计,并借助三维设计软件SolidWorks完成了整机的物理建模。该模型不仅直观展示了机器人的整体构型,也为后续的运动学分析、动力学仿真以及控制系统开发提供了可靠的几何基础。
论文的核心贡献在于提出了一套完整的六自由度码垛机器人结构设计流程,从自由度分配到关节尺寸确定,再到三维建模,均基于严谨的机构学理论。设计出的机器人具有紧凑的结构和灵活的运动能力,能够适应多种物料搬运需求。通过自主设计,有效降低了对外国技术的依赖,为国内码垛机器人产业的自主化发展提供了可行的技术路径。
结论与建议:
该研究通过系统分析人体手臂的运动特性,结合机器人机构学方法,成功设计了一款六自由度码垛装箱机器人,并利用SolidWorks建立了完整的三维模型。设计成果表明,自主开发实用型码垛机器人在技术上是可行的,能够显著提升国内相关设备的市场竞争力。建议后续研究在此基础上开展运动学与动力学仿真,优化关节驱动参数,并进一步完成样机制造与实验验证,以推动该设计的实际应用。
文档评价:
论文结构清晰,设计方法科学,内容紧扣码垛机器人结构设计主题,无冗余信息。提供的三维模型为工程实践提供了直接参考,对从事工业机器人研发的工程师和学生具有较高的实用价值。
使用建议:
读者可依据论文中的自由度分配与关节尺寸参数,结合自身应用场景进行局部调整。建议在SolidWorks中打开模型文件进行详细分析,并配合运动学仿真软件验证机器人工作空间与运动性能。

















暂无评论内容