第1页 / 共41页
第2页 / 共41页
第3页 / 共41页
第4页 / 共41页
第5页 / 共41页
第6页 / 共41页
第7页 / 共41页
第8页 / 共41页
试读已结束,还剩33页,您可下载完整版后进行离线阅读
付费资源
© 版权声明
文章版权归作者所有,未经允许请勿转载。
THE END
文档类型:毕业论文
适用人群:机械设计、自动化工程专业学生,工业机器人研发工程师,纸箱生产线设备技术人员
文档核心内容:
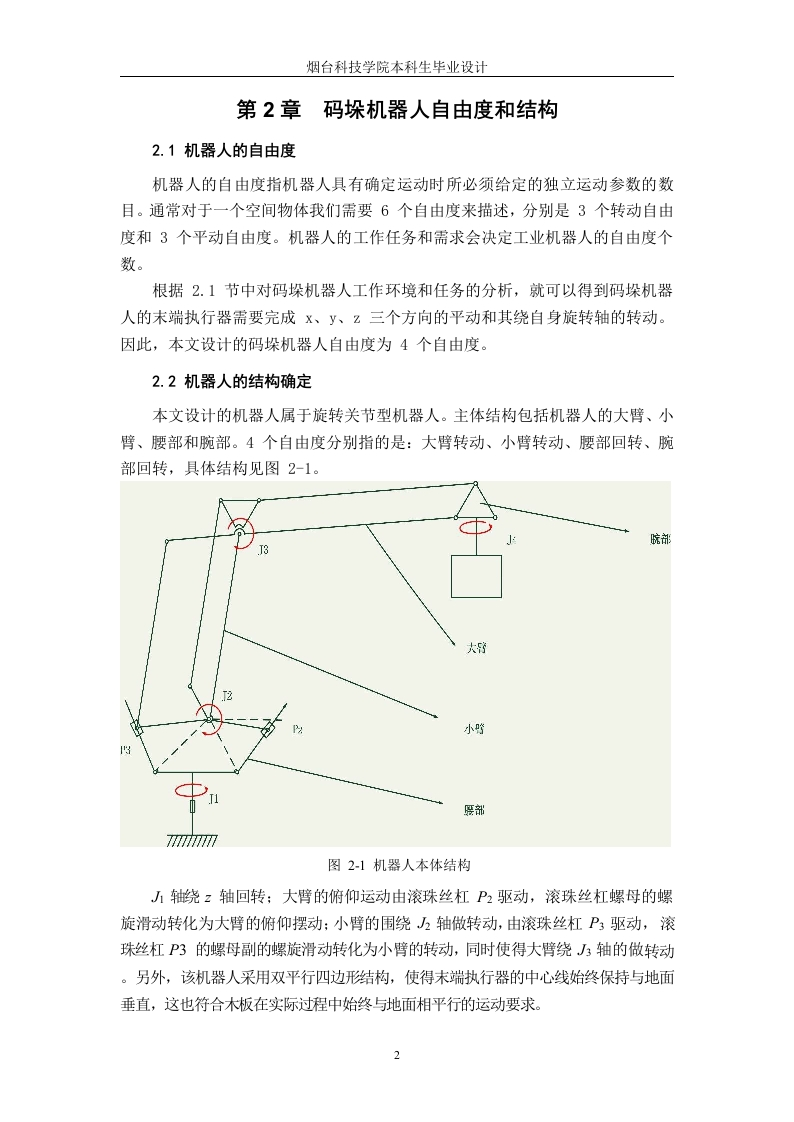
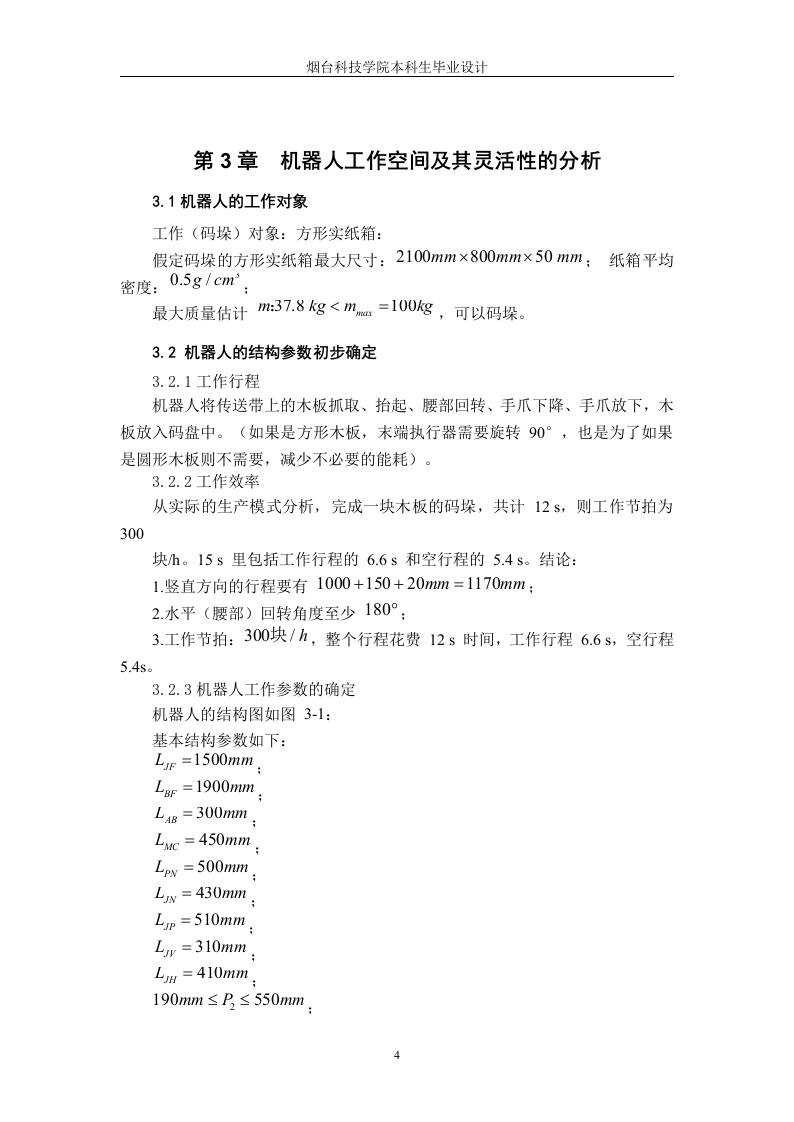
该论文围绕纸箱码垛机器人结构设计展开,针对现有码垛机器人只能执行单一任务、无法适应灵活木箱生产线的问题,提出了一套完整的设计与分析方案。核心内容包括:建立并分析码垛机器人工作空间,确定基本结构参数;建立坐标系下的运动学方程,采用数值方法分析工作空间与灵活性;完成轴、机械手等关键零件的选型、设计与校核;对关键部件进行静力学分析。研究旨在提升码垛机器人对工作对象的适应性,推动纸箱生产线的数字化与智能化水平。
可解决的实际问题:
该文档可为纸箱码垛机器人结构设计提供系统的方法论参考,帮助读者理解如何从工作空间分析出发,确定结构参数并完成运动学建模,进而进行零件选型与校核。对于需要设计适应多品种、小批量纸箱生产线的码垛机器人工程师,该研究提供了从理论分析到工程实现的完整路径,有效缩短设计周期并降低试错成本。
正文内容:
纸箱码垛机器人作为先进制造装备,凭借空间利用率高、工作效率高、智能化等优势,在现代纸箱生产线中扮演关键角色。然而,现有大多数码垛机器人仅能执行单一码垛任务,难以适应日益灵活的纸箱生产需求。因此,提高机器人对工作对象的适应性成为当前的核心任务。该研究从工作空间建立与分析入手,基于实际工作对象确定了机器人的基本结构参数,并在坐标系中建立了运动学方程。通过数值方法,系统分析了工作空间的覆盖范围与机器人的灵活性,为后续结构设计提供了理论依据。
在机械结构设计部分,论文完成了码垛机器人主体与机械臂的详细设计,绘制了三维模型。针对轴、机械手等关键零件,进行了严格的选型、设计与校核,确保其满足强度与刚度要求。此外,对关键部件实施了静力学分析,验证了结构在典型工况下的可靠性。整个设计流程体现了从理论分析到工程验证的闭环思路,为同类机器人的开发提供了可复用的方法。
结论与建议:
该研究通过工作空间分析、运动学建模、零件校核与静力学分析,系统完成了纸箱码垛机器人的结构设计,验证了所提方案在提升适应性方面的可行性。建议后续研究可进一步引入动态仿真与实验测试,以优化机器人在高速运行下的稳定性与精度。
文档评价:
该论文逻辑清晰,内容完整,从问题识别到解决方案层层递进,兼具理论深度与工程实用性。对于从事工业机器人结构设计的人员,是一份具有较高参考价值的技术资料。
使用建议:
读者可重点参考其中的工作空间分析方法与零件校核流程,结合自身生产线的实际工况,调整结构参数与材料选型。建议在阅读前具备基础力学与机器人运动学知识,以充分理解数值分析部分。

















暂无评论内容