主要内容
预览文档 文档类型:硕士学位论文(附录部分)。适配人群:机器人动力学研究人员、自动化控制工程师、机械系统仿真分析从业者,以及相关专业研究生。该文档可解决的核心问题:通过对比MATLAB动力学计算与ADAMS虚拟样机仿真结果,验证晶圆传输机器人动力学模型的准确性,并为轨迹控制优化提供初始条件与数据支撑。
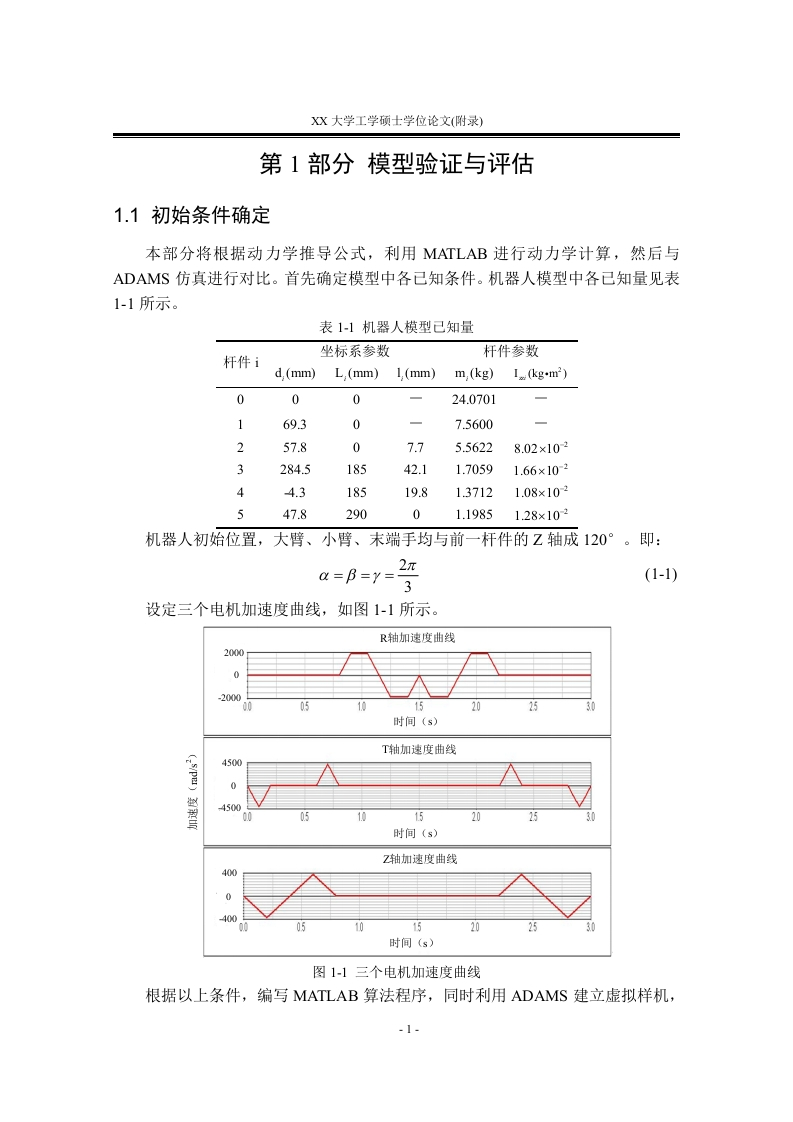
文档围绕晶圆传输机器人的振动分析与轨迹控制展开,重点呈现了模型验证与评估阶段的初始条件确定过程。基于动力学推导公式,利用MATLAB进行数值计算,并与ADAMS仿真结果进行对比,以检验模型的有效性。机器人模型中各已知量通过表格形式列出,包括坐标系参数与杆件参数,其中杆件编号从0到5,分别对应不同的连杆长度、质量与转动惯量。例如,杆件0的连杆长度为24.07mm,质量为7.56kg,转动惯量为0.0257kg·m²;杆件1的连杆长度为1169.3mm,质量为7.80kg,转动惯量为5.56×10⁻²kg·m²。机器人初始位置设定为大臂、小臂、末端手均与前一杆件的Z轴成120°,即角度α、β、γ均等于2π/3。
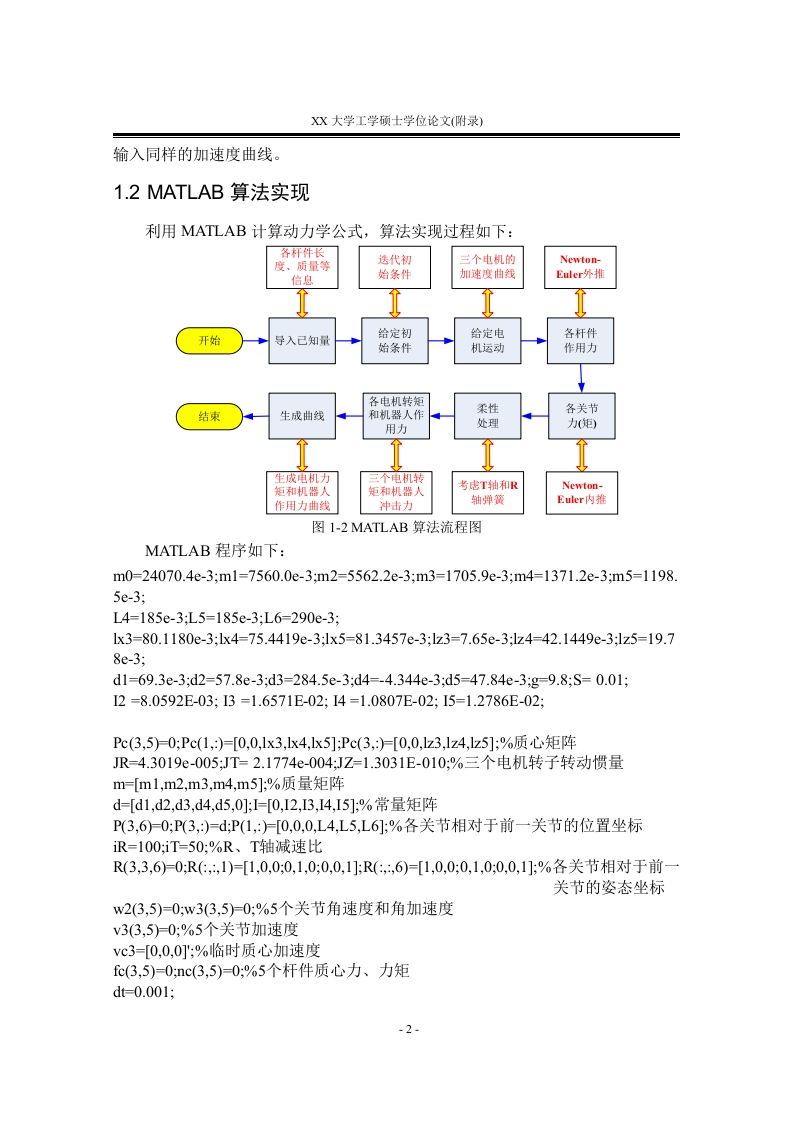
三个电机的加速度曲线分别对应R轴、T轴与Z轴,各轴加速度随时间变化,其中R轴加速度在0至20秒内呈现正负交替的波动,T轴加速度在0至15秒内经历多次峰值变化,Z轴加速度则在0至15秒内保持相对稳定的正负波动。这些加速度曲线为后续动力学计算与仿真提供了输入条件。文档通过编写MATLAB算法程序,同时利用ADAMS建立虚拟样机,实现了对机器人动力学行为的双重验证。该部分内容为整篇论文的模型验证奠定了数据基础,确保后续轨迹控制策略的可靠性。
该文档的独特价值在于提供了完整的初始条件设定与验证方法,适用于需要精确建立晶圆传输机器人动力学模型的场景。用户可通过该文档快速获取模型参数、初始角度设定及电机加速度曲线,从而复现或扩展相关研究。关键数据包括各杆件的长度、质量与转动惯量,以及初始角度与加速度曲线,这些数据是进行动力学仿真与轨迹控制优化的基础。文档内容严谨,数据详实,适合作为机器人动力学建模与仿真验证的参考依据。
文档围绕晶圆传输机器人的振动分析与轨迹控制展开,重点呈现了模型验证与评估阶段的初始条件确定过程。基于动力学推导公式,利用MATLAB进行数值计算,并与ADAMS仿真结果进行对比,以检验模型的有效性。机器人模型中各已知量通过表格形式列出,包括坐标系参数与杆件参数,其中杆件编号从0到5,分别对应不同的连杆长度、质量与转动惯量。例如,杆件0的连杆长度为24.07mm,质量为7.56kg,转动惯量为0.0257kg·m²;杆件1的连杆长度为1169.3mm,质量为7.80kg,转动惯量为5.56×10⁻²kg·m²。机器人初始位置设定为大臂、小臂、末端手均与前一杆件的Z轴成120°,即角度α、β、γ均等于2π/3。
三个电机的加速度曲线分别对应R轴、T轴与Z轴,各轴加速度随时间变化,其中R轴加速度在0至20秒内呈现正负交替的波动,T轴加速度在0至15秒内经历多次峰值变化,Z轴加速度则在0至15秒内保持相对稳定的正负波动。这些加速度曲线为后续动力学计算与仿真提供了输入条件。文档通过编写MATLAB算法程序,同时利用ADAMS建立虚拟样机,实现了对机器人动力学行为的双重验证。该部分内容为整篇论文的模型验证奠定了数据基础,确保后续轨迹控制策略的可靠性。
该文档的独特价值在于提供了完整的初始条件设定与验证方法,适用于需要精确建立晶圆传输机器人动力学模型的场景。用户可通过该文档快速获取模型参数、初始角度设定及电机加速度曲线,从而复现或扩展相关研究。关键数据包括各杆件的长度、质量与转动惯量,以及初始角度与加速度曲线,这些数据是进行动力学仿真与轨迹控制优化的基础。文档内容严谨,数据详实,适合作为机器人动力学建模与仿真验证的参考依据。
第1页 / 共86页
第2页 / 共86页
第3页 / 共86页
第4页 / 共86页
第5页 / 共86页
第6页 / 共86页
第7页 / 共86页
第8页 / 共86页
试读已结束,还剩78页,您可下载完整版后进行离线阅读
付费资源
© 版权声明
文章版权归作者所有,未经允许请勿转载。
THE END
















暂无评论内容