第1页 / 共9页
第2页 / 共9页

第3页 / 共9页
第4页 / 共9页
第5页 / 共9页
第6页 / 共9页
第7页 / 共9页
第8页 / 共9页
试读已结束,还剩1页,您可下载完整版后进行离线阅读
付费资源
© 版权声明
文章版权归作者所有,未经允许请勿转载。
THE END
基于MATLAB Robotics的SCARA机器人运动学分析及轨迹规划,是一份面向机器人学研究人员、自动化专业学生及工程技术人员的技术论文。该文档通过建立SCARA机器人的DH参数模型,详细阐述了正运动学求解过程,并提供了关键结构参数,为后续轨迹规划与控制算法开发奠定了理论基础。
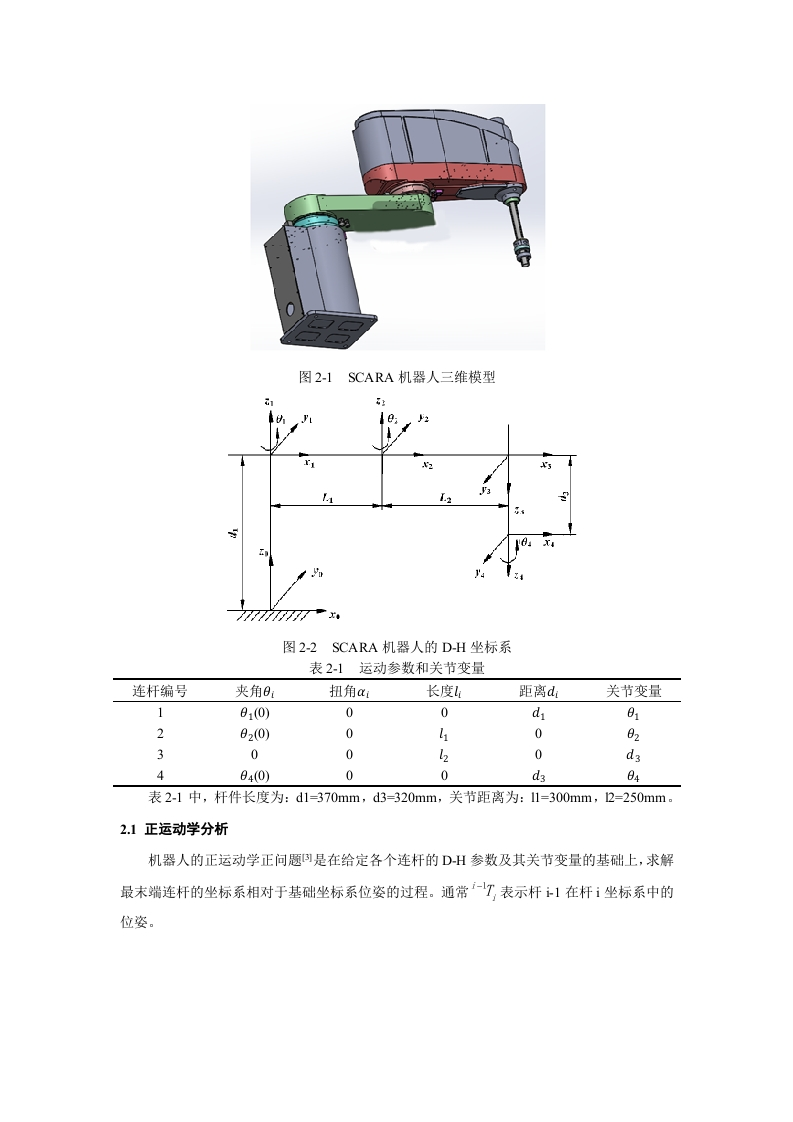
SCARA机器人是一种广泛应用于装配、搬运等工业场景的四自由度串联机器人。文档首先给出了机器人的三维模型及对应的DH坐标系,并列出表2-1运动参数和关节变量,其中明确标注了各连杆的夹角、扭角、长度、距离及关节变量定义。核心结构参数包括:杆件长度d1=370mm、d3=320mm,关节距离l1=300mm、l2=250mm。这些数据是进行运动学建模的基准。
在正运动学分析部分,文档定义了正运动学问题的本质:在给定各连杆DH参数及关节变量的前提下,求解末端连杆坐标系相对于基础坐标系的位姿变换矩阵。通常采用齐次变换矩阵T表示相邻连杆间的位姿关系,通过依次连乘得到末端位姿。这一过程是机器人运动学的基础,也是后续轨迹规划中计算关节空间与笛卡尔空间映射的关键步骤。
该文档可直接解决以下实际问题:帮助读者快速理解SCARA机器人的几何结构与运动学原理,为使用MATLAB Robotics工具箱进行仿真验证提供参数依据。同时,文档中的DH参数表可作为标准模板,用于其他类似构型机器人的建模参考。通过掌握正运动学分析方法,用户能够进一步开展逆运动学求解、工作空间分析以及连续轨迹规划等进阶工作。
总结而言,这份技术论文以清晰的DH参数表和正运动学推导为核心,为SCARA机器人的运动学分析与轨迹规划提供了完整的数据支撑和方法论。无论是教学演示还是工程应用,均具有较高的参考价值。

















暂无评论内容