主要内容
预览文档 这是一篇技术论文,适用于机械设计工程师、有限元分析人员及工程机械研发人员。文档详细阐述了如何利用ANSYS APDL对动臂进行有限元建模、强度与刚度分析,并结合运动学模型模拟作业工况,为结构优化提供可靠依据。
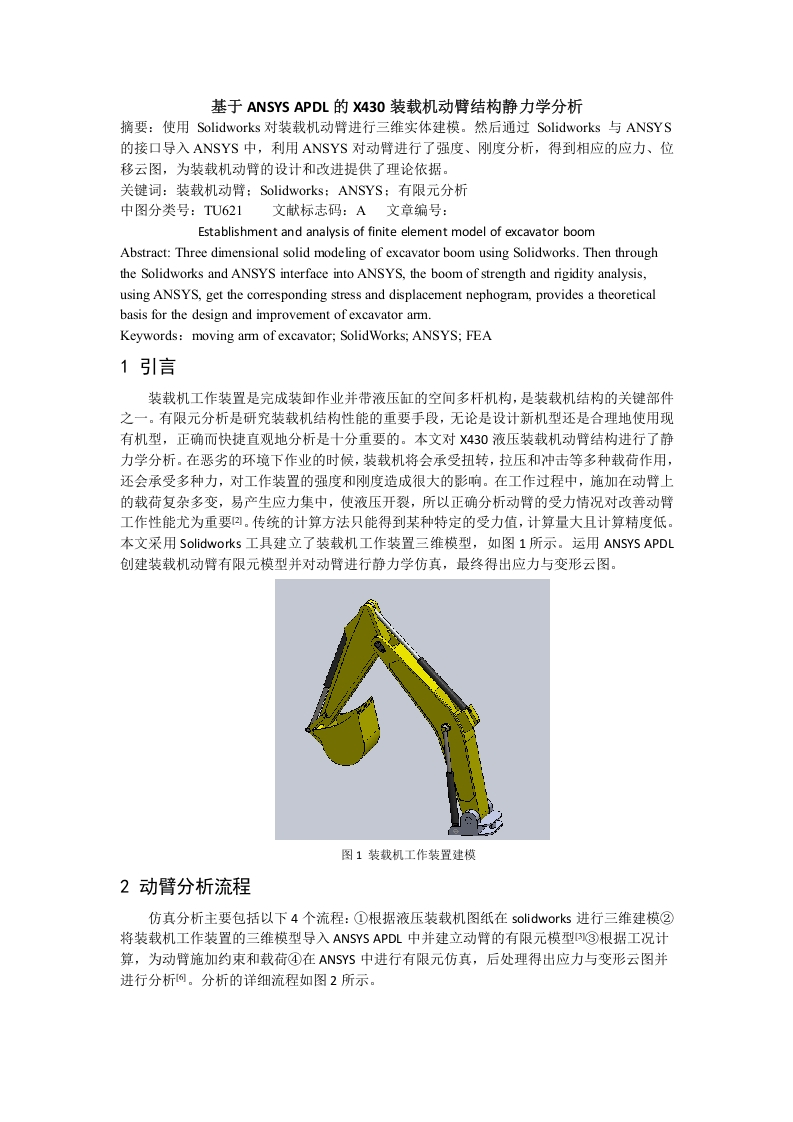
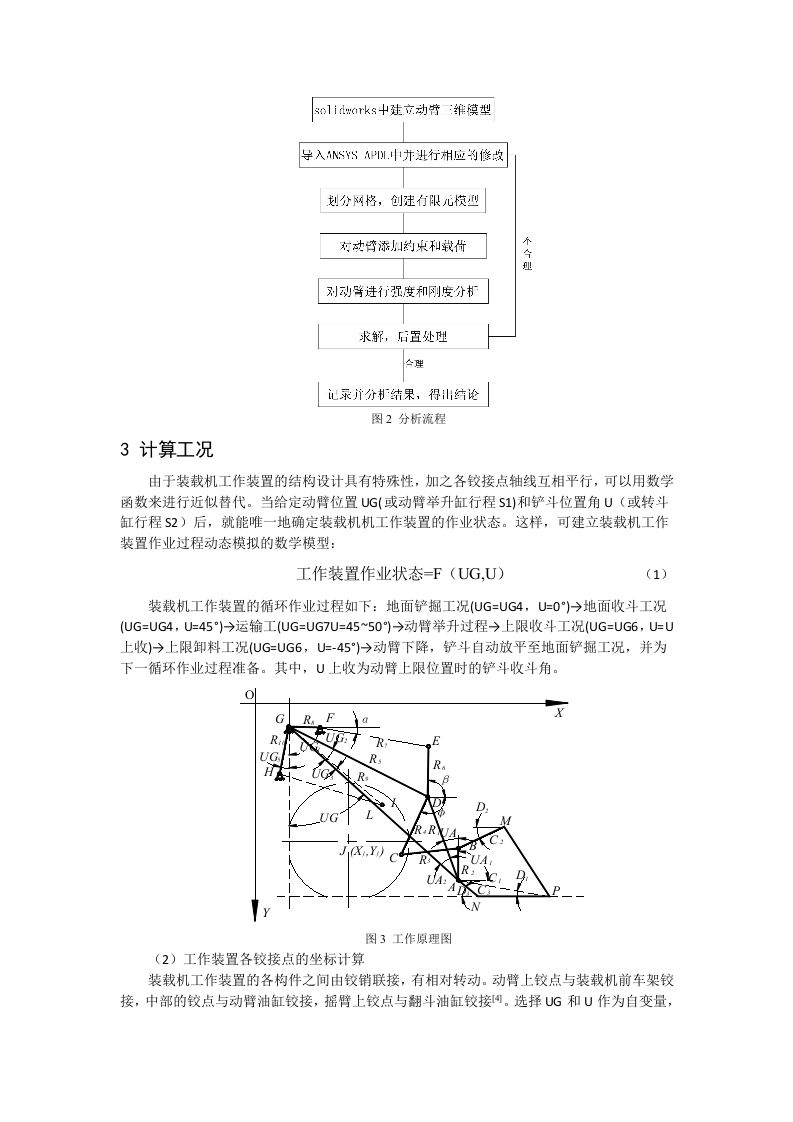
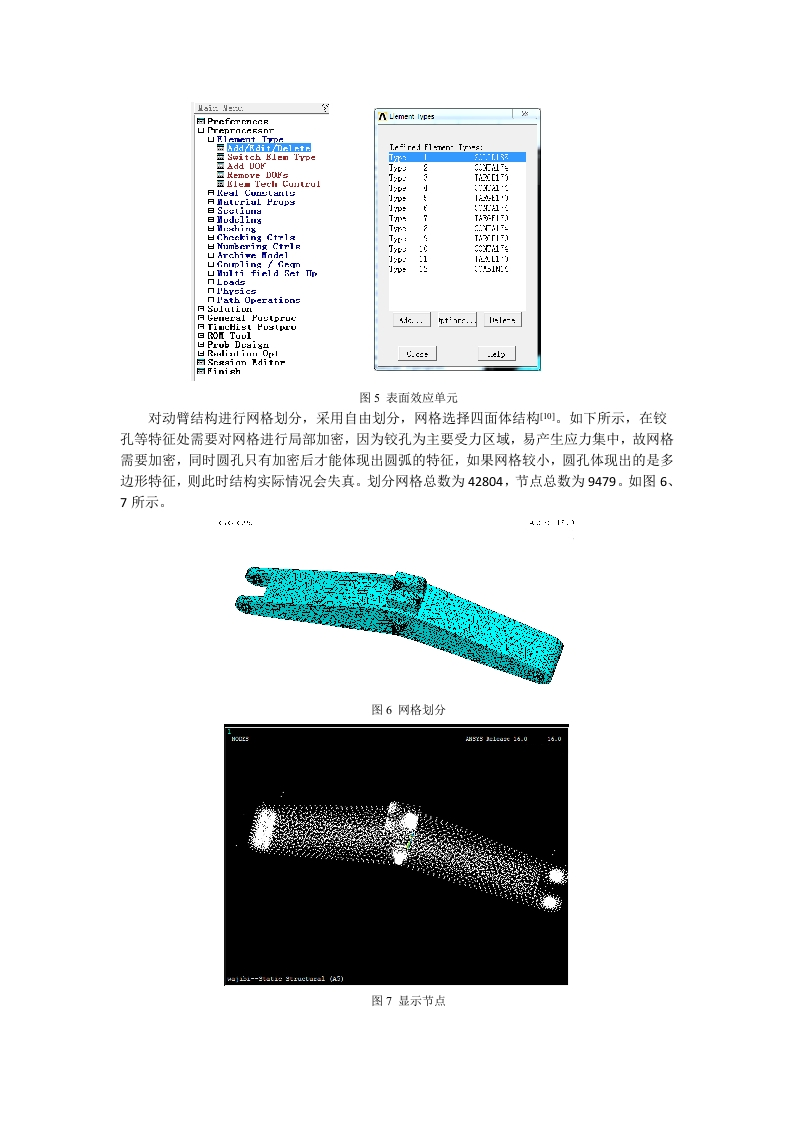
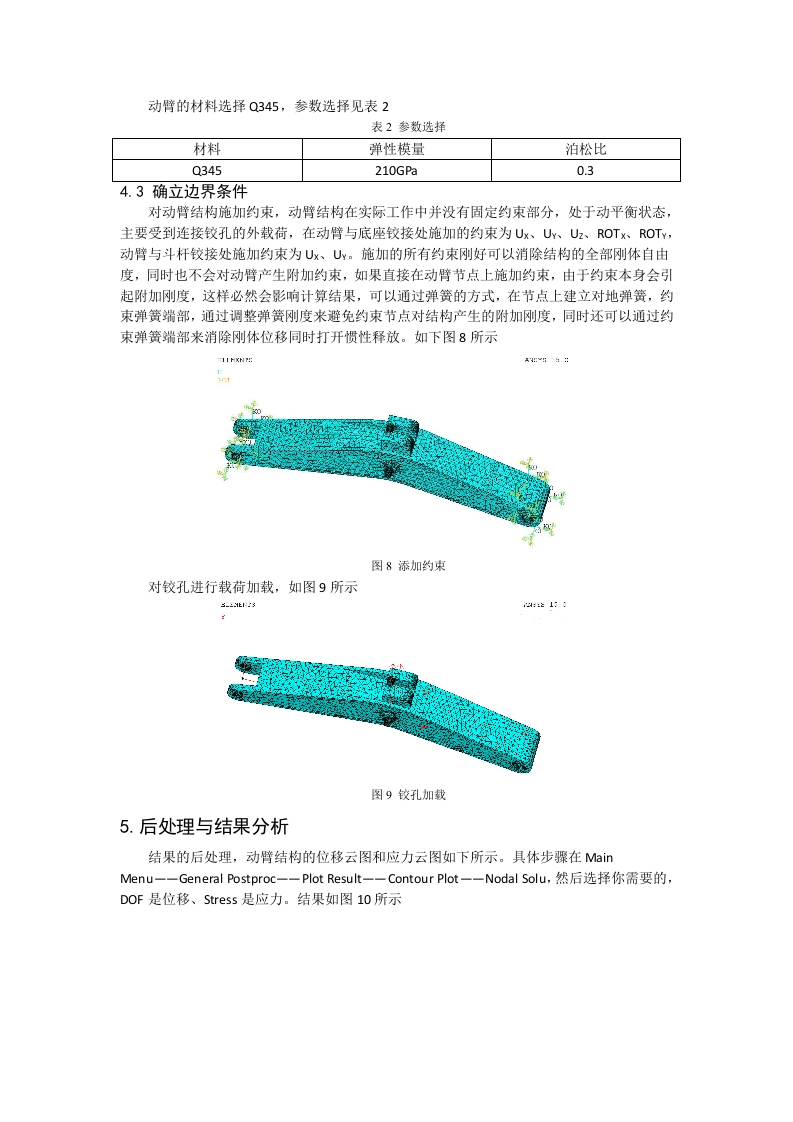
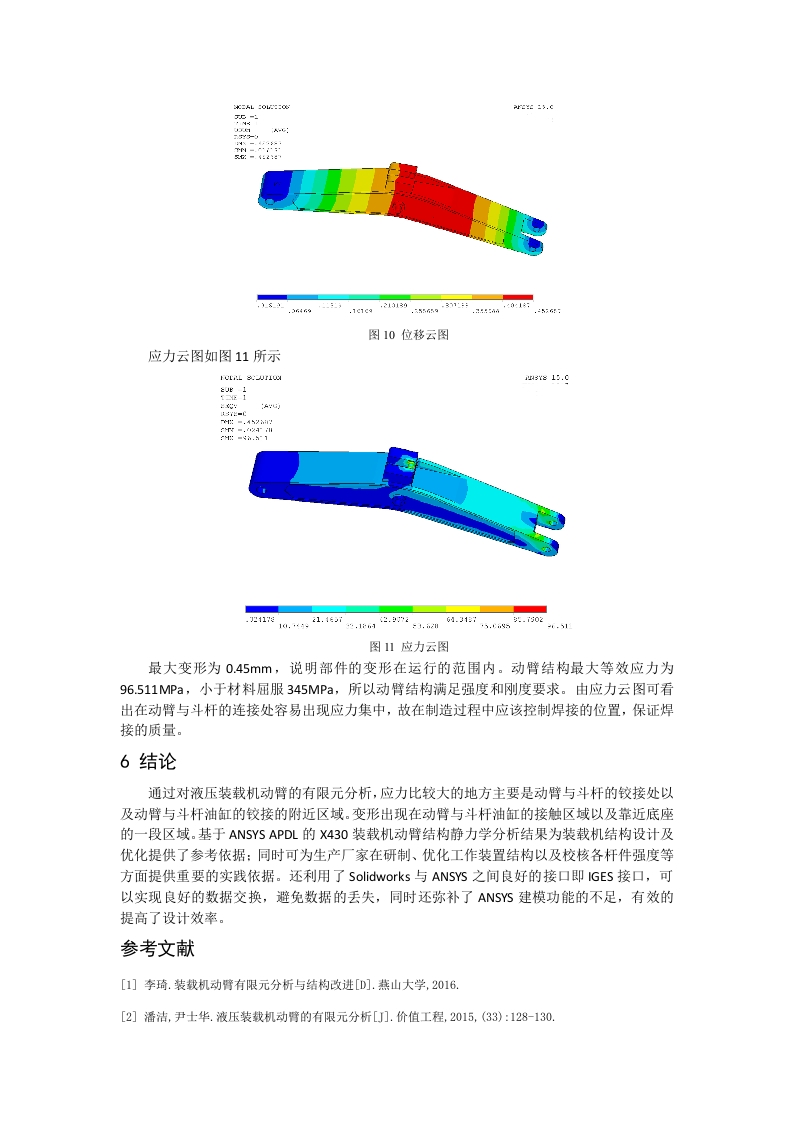
文档首先将装载机工作装置的二维模型导入ANSYS APDL,经过几何修改与网格划分,创建完整的有限元模型。随后添加约束与载荷,进行静力学分析,求解动臂的强度与刚度,并在后处理中合理记录并分析结果,最终得出结论。分析流程如图2所示,计算工况如图3工作原理图所示。
由于装载机工作装置结构具有特殊性,各铰接点轴线互相平行,可用数学函数近似替代。给定动臂位置UG(或动臂举升缸行程S1)和铲斗位置角U(或转斗缸行程S2),即可唯一确定作业状态,建立动态模拟数学模型:工作装置作业状态 = F(UG, U)。循环作业过程包括:地面铲掘(UG=UG4, U=0)→地面收斗(UG=UG4, U=45)→运输(UG=UG7, U=45~50)→动臂举升→上限收斗(UG=UG6, U=U上收)→上限卸料(UG=UG6, U=-45)→动臂下降、铲斗自动放平至地面铲掘工况。其中U上收为动臂上限位置时的铲斗收斗角。
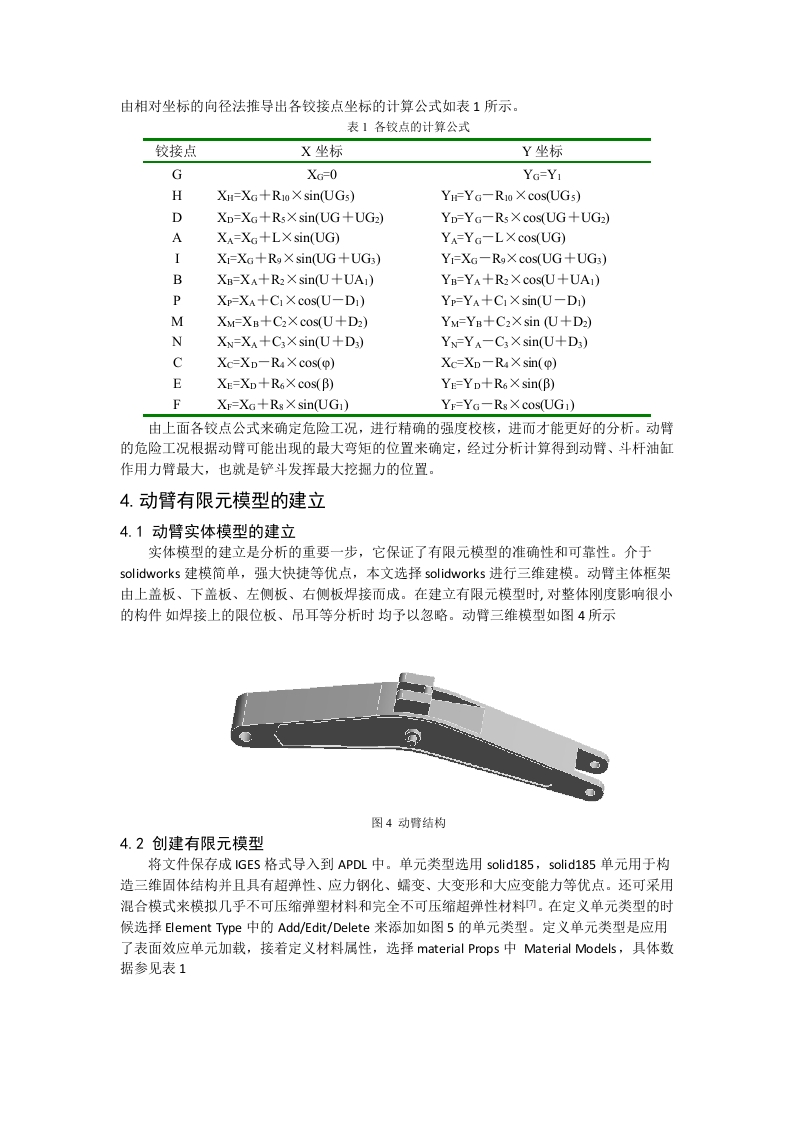
工作装置各铰接点坐标通过计算得出:动臂上铰点与前车架铰接,中部铰点与动臂油缸铰接,摇臂上铰点与翻斗油缸铰接。选择UG和U作为自变量,可精确描述各构件相对转动关系。文档解决了动臂在复杂工况下的受力分析问题,帮助工程师快速评估结构可靠性,避免设计缺陷。
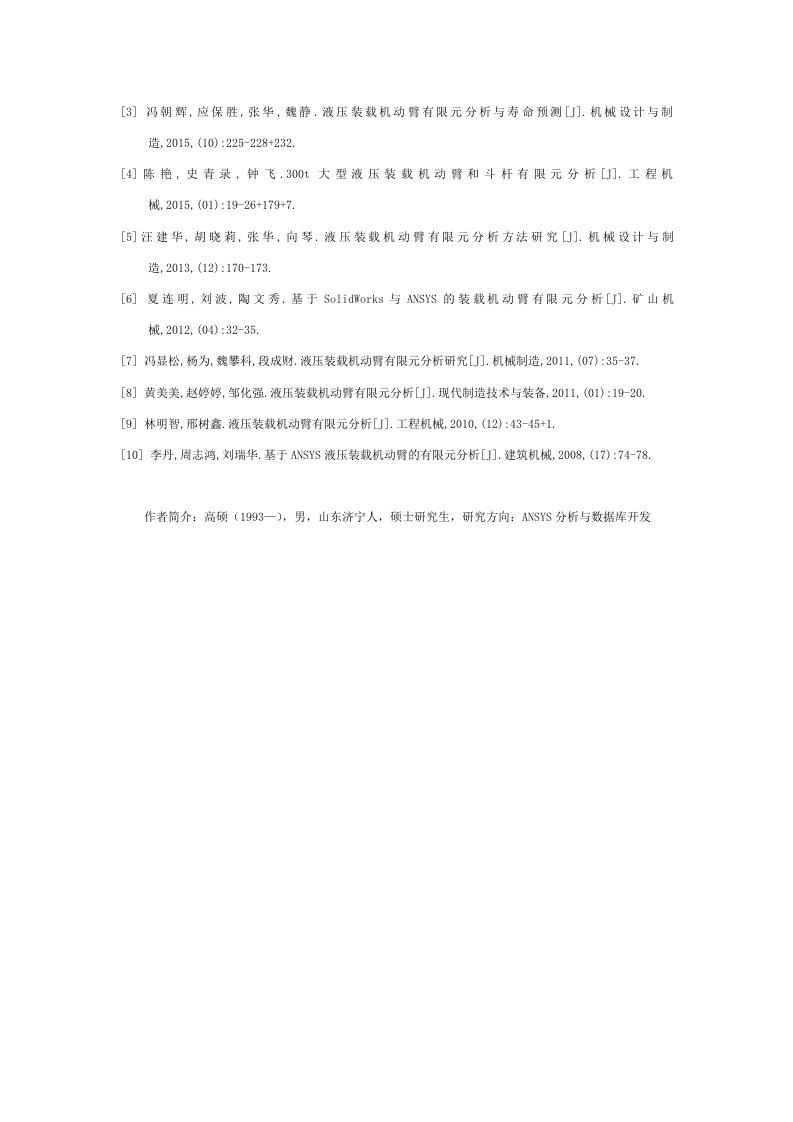
关键数据包括各工况下的应力分布与变形量,核心结论表明动臂在极限工况下满足强度要求,但局部区域存在刚度不足,需优化铰点位置或截面尺寸。该文档为工程机械研发人员提供了完整的有限元分析流程与运动学建模方法,可直接用于同类结构的性能评估与改进设计。
文档首先将装载机工作装置的二维模型导入ANSYS APDL,经过几何修改与网格划分,创建完整的有限元模型。随后添加约束与载荷,进行静力学分析,求解动臂的强度与刚度,并在后处理中合理记录并分析结果,最终得出结论。分析流程如图2所示,计算工况如图3工作原理图所示。
由于装载机工作装置结构具有特殊性,各铰接点轴线互相平行,可用数学函数近似替代。给定动臂位置UG(或动臂举升缸行程S1)和铲斗位置角U(或转斗缸行程S2),即可唯一确定作业状态,建立动态模拟数学模型:工作装置作业状态 = F(UG, U)。循环作业过程包括:地面铲掘(UG=UG4, U=0)→地面收斗(UG=UG4, U=45)→运输(UG=UG7, U=45~50)→动臂举升→上限收斗(UG=UG6, U=U上收)→上限卸料(UG=UG6, U=-45)→动臂下降、铲斗自动放平至地面铲掘工况。其中U上收为动臂上限位置时的铲斗收斗角。
工作装置各铰接点坐标通过计算得出:动臂上铰点与前车架铰接,中部铰点与动臂油缸铰接,摇臂上铰点与翻斗油缸铰接。选择UG和U作为自变量,可精确描述各构件相对转动关系。文档解决了动臂在复杂工况下的受力分析问题,帮助工程师快速评估结构可靠性,避免设计缺陷。
关键数据包括各工况下的应力分布与变形量,核心结论表明动臂在极限工况下满足强度要求,但局部区域存在刚度不足,需优化铰点位置或截面尺寸。该文档为工程机械研发人员提供了完整的有限元分析流程与运动学建模方法,可直接用于同类结构的性能评估与改进设计。
第1页 / 共7页
第2页 / 共7页
第3页 / 共7页
第4页 / 共7页
第5页 / 共7页
第6页 / 共7页
第7页 / 共7页
已完成全部阅读,共7页
付费资源
© 版权声明
文章版权归作者所有,未经允许请勿转载。
THE END
















暂无评论内容