主要内容
预览文档 文档类型:本科毕业设计论文。
适用人群:自动化、机械电子、嵌入式系统相关专业学生,从事物料搬运机器人研发的工程师,以及单片机控制系统学习者。
文档核心内容:该论文聚焦于智能物料机器人的整体控制设计,针对现有物料机器人功能单一、仅能传送物体的局限,提出将抓取与传送功能合二为一的方案,以降低设备数量与生产成本。研究基于MCS-51系列单片机(AT89C52芯片)的低成本、高可靠性优势,完成了机器人控制系统的完整设计,包括机械臂运动控制、机械臂控制器电路与程序、主控制器电路与程序,以及单片机抗干扰设计。系统配备了AD转换、分频器、红外传感器、功率驱动模块等外围电路,并采用汇编语言编写了电机定位PWM算法、多机通信程序及主控制器工作程序等关键软件。
文档解决的实际问题:
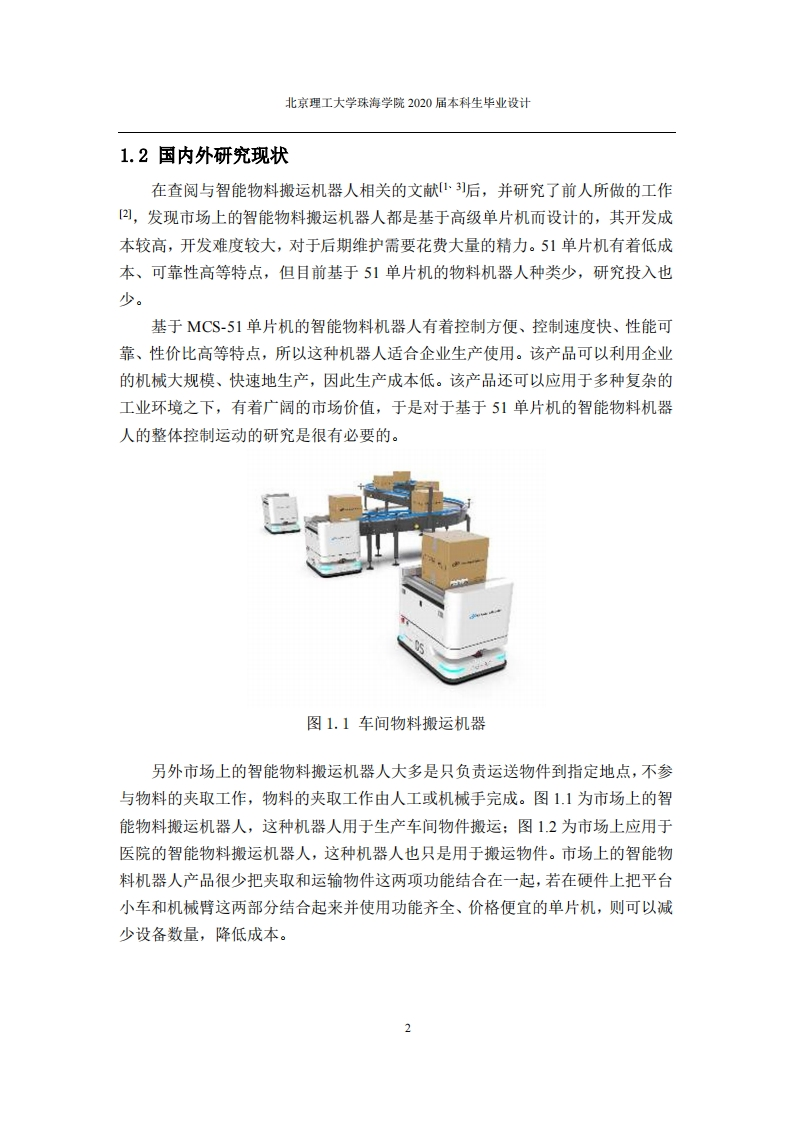
1. 功能单一问题:传统物料机器人仅能传送物体,该设计通过集成机械臂抓取功能,实现“抓取+传送”一体化,减少设备数量,降低产线成本。
2. 控制成本与可靠性平衡:选用AT89C52单片机作为核心,在保证控制精度的前提下,利用MCS-51系列成熟稳定的特性,实现低成本、高可靠性的智能升级。
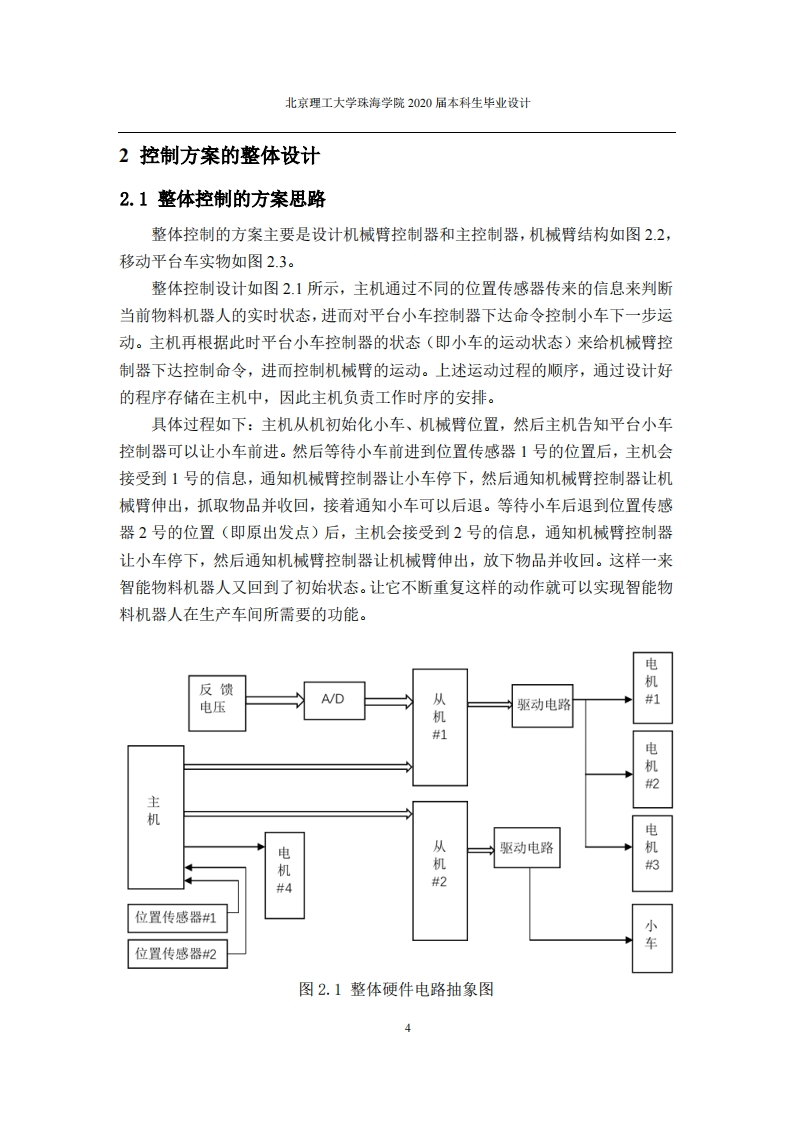
3. 多机协同与抗干扰:通过多机通信程序实现主控制器与机械臂控制器的协调工作,并专门设计抗干扰方案,提升系统在工业环境中的稳定性。
关键数据与结论:
核心芯片:AT89C52。
关键技术:电机定位PWM算法、多机通信程序、抗干扰设计。
核心结论:基于MCS-51单片机的智能物料机器人控制方案,能够以较低成本实现物料抓取与传送的复合功能,且系统具备良好的可靠性与抗干扰能力,适用于中小型产线或教学实验场景。
文档价值:为从事单片机控制与机器人设计的读者提供了一套完整的硬件选型、电路设计、程序开发及抗干扰处理的技术参考。尤其对于希望用低成本方案实现物料机器人智能化升级的研发人员,该论文中的多机通信架构与PWM控制算法具有直接借鉴意义。
适用人群:自动化、机械电子、嵌入式系统相关专业学生,从事物料搬运机器人研发的工程师,以及单片机控制系统学习者。
文档核心内容:该论文聚焦于智能物料机器人的整体控制设计,针对现有物料机器人功能单一、仅能传送物体的局限,提出将抓取与传送功能合二为一的方案,以降低设备数量与生产成本。研究基于MCS-51系列单片机(AT89C52芯片)的低成本、高可靠性优势,完成了机器人控制系统的完整设计,包括机械臂运动控制、机械臂控制器电路与程序、主控制器电路与程序,以及单片机抗干扰设计。系统配备了AD转换、分频器、红外传感器、功率驱动模块等外围电路,并采用汇编语言编写了电机定位PWM算法、多机通信程序及主控制器工作程序等关键软件。
文档解决的实际问题:
1. 功能单一问题:传统物料机器人仅能传送物体,该设计通过集成机械臂抓取功能,实现“抓取+传送”一体化,减少设备数量,降低产线成本。
2. 控制成本与可靠性平衡:选用AT89C52单片机作为核心,在保证控制精度的前提下,利用MCS-51系列成熟稳定的特性,实现低成本、高可靠性的智能升级。
3. 多机协同与抗干扰:通过多机通信程序实现主控制器与机械臂控制器的协调工作,并专门设计抗干扰方案,提升系统在工业环境中的稳定性。
关键数据与结论:
核心芯片:AT89C52。
关键技术:电机定位PWM算法、多机通信程序、抗干扰设计。
核心结论:基于MCS-51单片机的智能物料机器人控制方案,能够以较低成本实现物料抓取与传送的复合功能,且系统具备良好的可靠性与抗干扰能力,适用于中小型产线或教学实验场景。
文档价值:为从事单片机控制与机器人设计的读者提供了一套完整的硬件选型、电路设计、程序开发及抗干扰处理的技术参考。尤其对于希望用低成本方案实现物料机器人智能化升级的研发人员,该论文中的多机通信架构与PWM控制算法具有直接借鉴意义。
第1页 / 共52页

第2页 / 共52页
第3页 / 共52页
第4页 / 共52页
第5页 / 共52页
第6页 / 共52页
第7页 / 共52页
第8页 / 共52页
试读已结束,还剩44页,您可下载完整版后进行离线阅读
付费资源
© 版权声明
文章版权归作者所有,未经允许请勿转载。
THE END
















暂无评论内容