主要内容
预览文档 小型圆柱坐标机械手的设计是一篇毕业设计论文,主要面向机械设计、自动化专业的学生以及从事工业机器人设计的技术人员。该文档详细阐述了如何设计一款具有3个自由度的圆柱坐标机械手,包括结构选型、驱动方式、气动系统、电控系统以及完整的动作流程,为同类小型机械手的开发提供了系统性的参考方案。
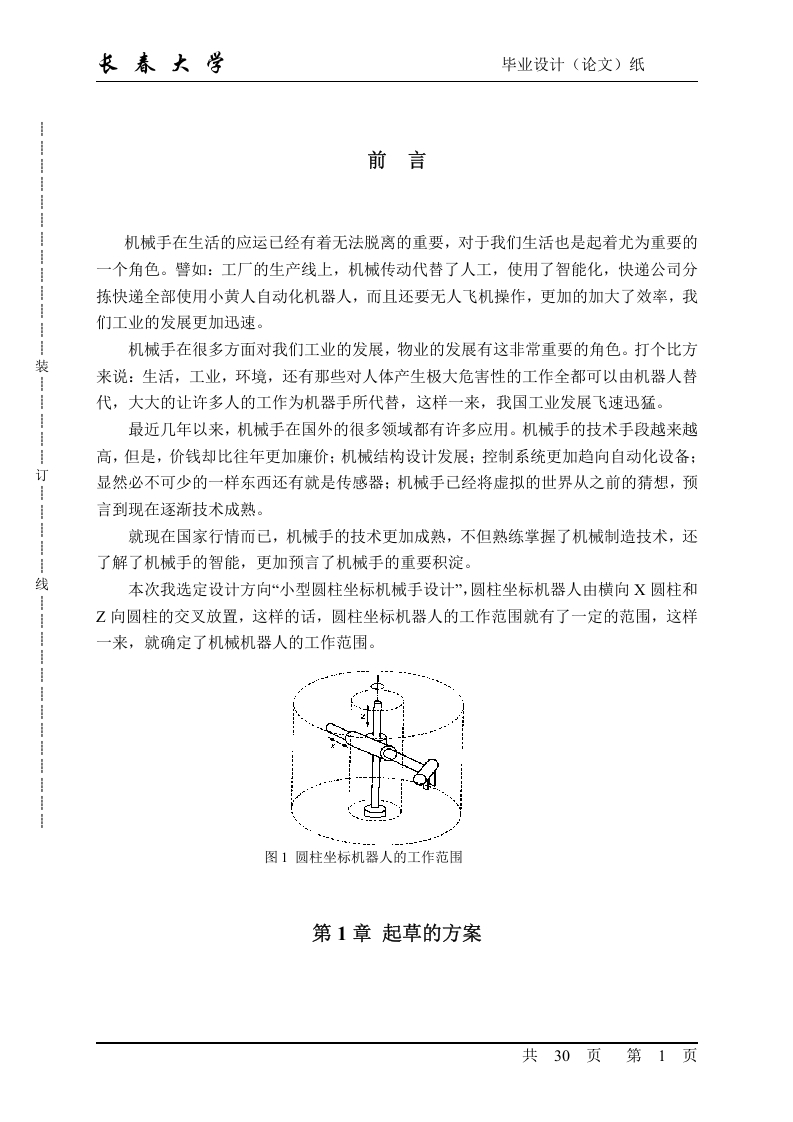
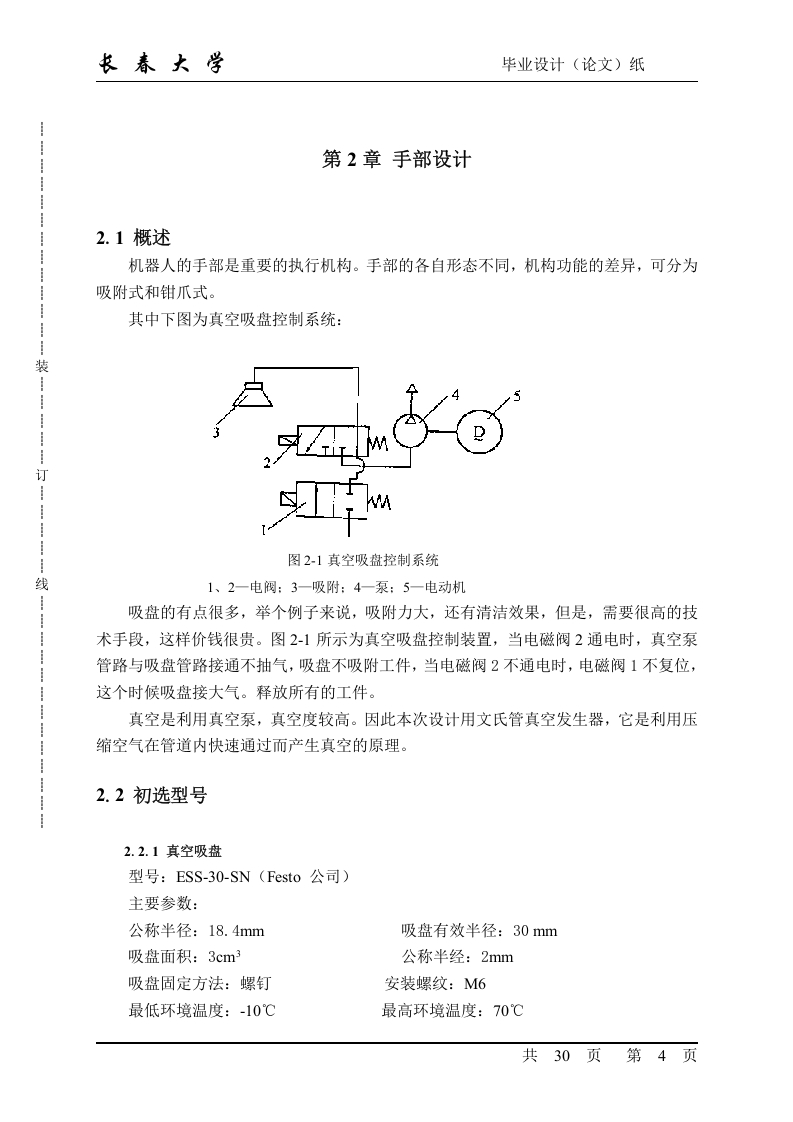
该机械手采用圆柱坐标结构,包含三个运动关节:手臂升降直线运动关节、径向直线运动关节以及回转运动关节。升降动作由双杆气缸实现,该气缸并列在同一缸体上,结构紧凑;回转气缸则置于升降缸下方,整体刚性较好。手部采用真空吸盘,通过文丘里管式真空发生器产生负压,利用压缩空气在管道中快速流动的原理来抓取工件。设计过程中根据实际需求计算并选择了合适的真空发生器型号,同时对气缸的驱动力和回转力矩进行了校核。
气动系统采用一对功能换向回路,使用两个电磁阀控制活塞的双向运动,实现精准换向。电控系统选用三菱F1系列PLC(型号F1-40MR),输入点共14个(X400-X407、X500-X505),输出点共8个(Y430-Y437),能够可靠地控制机械手按预定顺序运行。机械手的完整动作顺序为:原位→下降→夹持→上升→右移→左转→下降→松开→上升→右转→左移→复位,该流程覆盖了从取料到放料的全过程。
文档的核心价值在于将理论计算与工程实践相结合,从自由度配置、气缸选型、真空系统设计到PLC编程控制,形成了一套完整的小型圆柱坐标机械手设计方案。对于需要设计类似抓取搬运装置的用户,该文档可直接作为结构选型、气动回路设计和控制逻辑编排的参考依据,尤其适用于教学实验、小型自动化产线改造等场景。
该机械手采用圆柱坐标结构,包含三个运动关节:手臂升降直线运动关节、径向直线运动关节以及回转运动关节。升降动作由双杆气缸实现,该气缸并列在同一缸体上,结构紧凑;回转气缸则置于升降缸下方,整体刚性较好。手部采用真空吸盘,通过文丘里管式真空发生器产生负压,利用压缩空气在管道中快速流动的原理来抓取工件。设计过程中根据实际需求计算并选择了合适的真空发生器型号,同时对气缸的驱动力和回转力矩进行了校核。
气动系统采用一对功能换向回路,使用两个电磁阀控制活塞的双向运动,实现精准换向。电控系统选用三菱F1系列PLC(型号F1-40MR),输入点共14个(X400-X407、X500-X505),输出点共8个(Y430-Y437),能够可靠地控制机械手按预定顺序运行。机械手的完整动作顺序为:原位→下降→夹持→上升→右移→左转→下降→松开→上升→右转→左移→复位,该流程覆盖了从取料到放料的全过程。
文档的核心价值在于将理论计算与工程实践相结合,从自由度配置、气缸选型、真空系统设计到PLC编程控制,形成了一套完整的小型圆柱坐标机械手设计方案。对于需要设计类似抓取搬运装置的用户,该文档可直接作为结构选型、气动回路设计和控制逻辑编排的参考依据,尤其适用于教学实验、小型自动化产线改造等场景。
第1页 / 共34页
第2页 / 共34页
第3页 / 共34页
第4页 / 共34页
第5页 / 共34页
第6页 / 共34页
第7页 / 共34页
第8页 / 共34页
试读已结束,还剩26页,您可下载完整版后进行离线阅读
付费资源
© 版权声明
文章版权归作者所有,未经允许请勿转载。
THE END
















暂无评论内容