主要内容
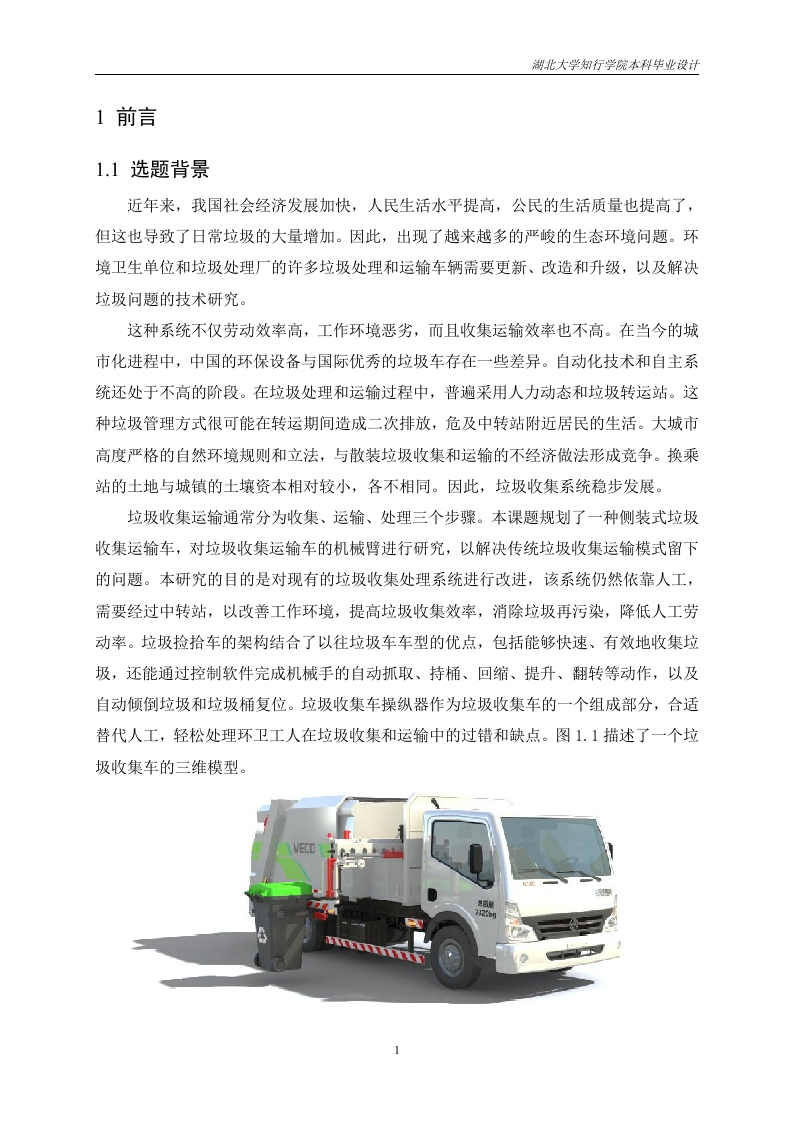
预览文档 垃圾清运车机械手结构设计与仿真属于本科毕业设计论文类型,主要面向机械设计、自动化控制、环境工程等相关专业的学生及从事环卫装备研发的工程技术人员。该文档系统阐述了垃圾清运车机械手从方案规划到运动学与结构优化设计的完整流程,重点解决了机械手如何实现垃圾桶的抓取、回收、拖拽、翻转、倾倒及复位等系列动作的技术问题。
文档首先根据技术指标和实际目标,确定了机械手的整体结构方案,并完成了运动学分析与结构优化设计。在控制系统方面,选用了专为恶劣工业环境设计的高稳定性西门子S7-200 PLC作为控制器,该型号在国内应用广泛,能够满足垃圾清运车机械手在复杂工况下的可靠运行需求。驱动系统的构建则严格对标设计规格与预期目标,确保机械手各动作的精准执行。
核心内容涵盖机械手结构方案与控制系统的选型依据、基于电机型号的参数计算、几何模型的建立以及工作理论的研究。文档对主要部件进行了详细设计,包括机械臂、夹爪、回转机构等关键零部件的结构参数与材料选择。关键结论表明,采用PLC控制器的机械手系统能够有效提升垃圾清运作业的自动化水平,降低人工劳动强度,同时通过结构优化设计提高了机械手的抓取稳定性和使用寿命。
该文档的独特价值在于提供了从理论分析到工程实现的完整参考框架。对于正在设计或改进垃圾清运车机械手的学生和工程师而言,可直接借鉴其中的结构方案选型逻辑、PLC控制系统的配置方法以及关键部件的设计参数。实际应用场景包括城市环卫垃圾收集、小区垃圾桶自动装卸、垃圾中转站物料转运等需要机械手完成重复性抓取与倾倒作业的领域。通过阅读该文档,用户能够快速判断其结构设计思路是否适用于自身项目需求,并获取可落地的技术细节。
文档首先根据技术指标和实际目标,确定了机械手的整体结构方案,并完成了运动学分析与结构优化设计。在控制系统方面,选用了专为恶劣工业环境设计的高稳定性西门子S7-200 PLC作为控制器,该型号在国内应用广泛,能够满足垃圾清运车机械手在复杂工况下的可靠运行需求。驱动系统的构建则严格对标设计规格与预期目标,确保机械手各动作的精准执行。
核心内容涵盖机械手结构方案与控制系统的选型依据、基于电机型号的参数计算、几何模型的建立以及工作理论的研究。文档对主要部件进行了详细设计,包括机械臂、夹爪、回转机构等关键零部件的结构参数与材料选择。关键结论表明,采用PLC控制器的机械手系统能够有效提升垃圾清运作业的自动化水平,降低人工劳动强度,同时通过结构优化设计提高了机械手的抓取稳定性和使用寿命。
该文档的独特价值在于提供了从理论分析到工程实现的完整参考框架。对于正在设计或改进垃圾清运车机械手的学生和工程师而言,可直接借鉴其中的结构方案选型逻辑、PLC控制系统的配置方法以及关键部件的设计参数。实际应用场景包括城市环卫垃圾收集、小区垃圾桶自动装卸、垃圾中转站物料转运等需要机械手完成重复性抓取与倾倒作业的领域。通过阅读该文档,用户能够快速判断其结构设计思路是否适用于自身项目需求,并获取可落地的技术细节。
第1页 / 共44页
第2页 / 共44页
第3页 / 共44页
第4页 / 共44页
第5页 / 共44页

第6页 / 共44页
第7页 / 共44页

第8页 / 共44页
试读已结束,还剩36页,您可下载完整版后进行离线阅读
付费资源
© 版权声明
文章版权归作者所有,未经允许请勿转载。
THE END
















暂无评论内容