主要内容
预览文档 文档类型:论文
适用人群:农业机械设计人员、机械工程专业学生、自动化采摘设备研发工程师、果园种植管理者
文档核心内容:
该论文围绕苹果采摘机械手的设计展开,提出了一种基于仿生学与人体工学原理的机械手爪方案。文档详细阐述了机械手的整体结构,包括基座、大臂、小臂、手腕等部件,并说明了其采用交流伺服电机驱动、气压辅助传动的动力方式。设计目标在于解决传统人工采摘效率低、苹果易受损的问题,实现机械手的自由伸展、多自由度转动及夹持操作。文中对关键零部件如基座、手臂、伸缩连杆、末端执行器及齿轮进行了具体设计,并提供了手臂与小车动力计算参数。最终通过三维建模展示了各级部件(一级上臂、大臂、小臂、末端执行器、伸缩连杆)及装配总图,验证了结构的合理性与紧凑性。
可解决的实际问题:
该设计可有效减少苹果采摘过程中的机械损伤,提升采摘作业的自动化水平。适用于规模化果园中替代人工进行重复性采摘工作,尤其针对需要精细抓取、避免果实挤压的作业场景。文档为农业机器人手爪的研发提供了结构参考与动力计算依据,有助于解决劳动力短缺与采收成本高的问题。
正文内容:
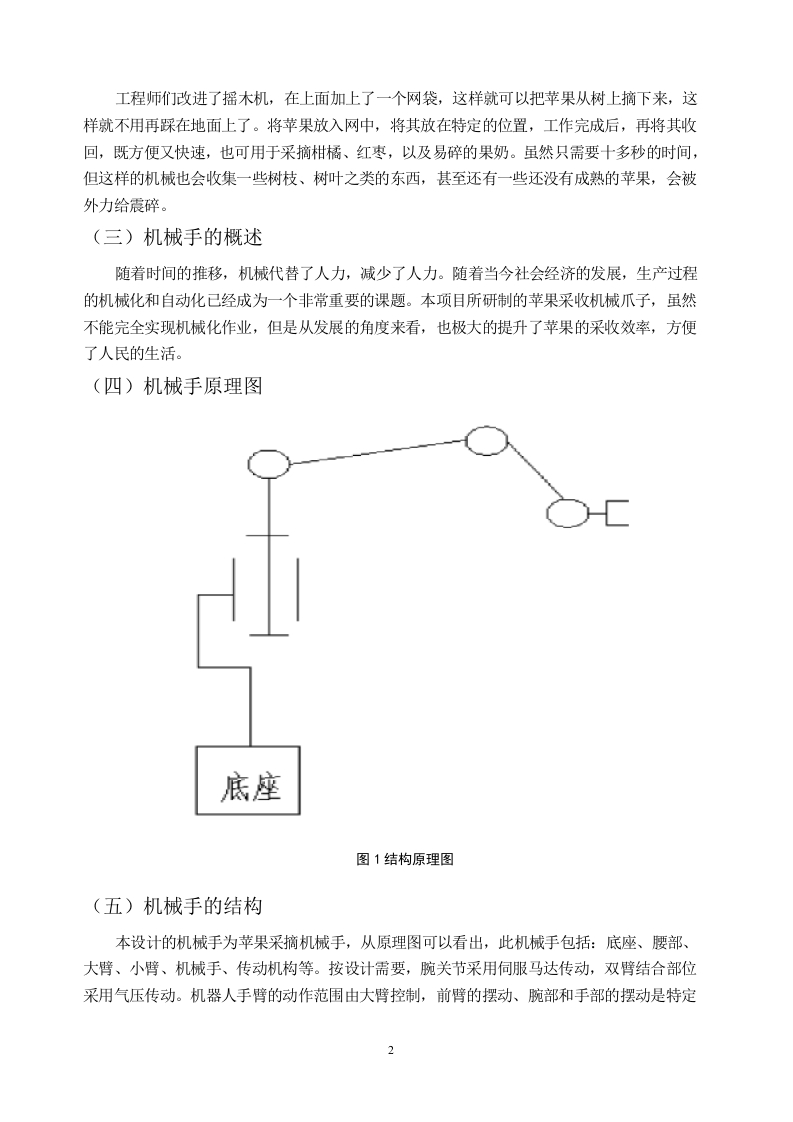
苹果采摘机械手的设计旨在应对传统手工采摘效率低、果实易受损的行业痛点。该研究提出了一种仿生机械手爪,通过模拟人体工学原理,使设备更符合实际采摘操作需求。机械手整体由基座、大臂、小臂、手腕等模块构成,能够完成自由伸展、多自由度转动以及夹持等动作。动力系统采用交流伺服电机驱动,配合气压传动实现小幅度的机械运动,从而保证操作的平稳性与精准度。
在结构设计方面,论文对基座、手臂、伸缩连杆、末端执行器及齿轮等关键零部件进行了详细规划。基座作为支撑基础,确保整体稳定性;手臂部分分为大臂与小臂,负责实现主要运动范围;伸缩连杆用于调节作业距离;末端执行器采用双爪齿轮结构,能够有效抓取苹果并避免损伤。驱动方式上,交流伺服电机提供主要动力,气压系统则辅助完成精细动作,这种组合兼顾了动力输出与控制的灵活性。
参数设计部分,论文对末端执行器齿轮双爪、手臂动力及小车动力进行了计算。通过力学分析,确定了各部件所需的驱动力矩与运动范围,确保机械手在作业过程中能够承受负载并保持稳定。三维建模环节展示了一级上臂、大臂、小臂、末端执行器、伸缩连杆以及装配总图,直观呈现了各部件之间的装配关系与运动逻辑。整体设计强调电路简化、维护方便、操作便捷,同时优化了机械结构,使其更加紧凑实用。
结论与建议:
该研究通过仿生设计与动力计算,成功构建了一种适用于苹果采摘的机械手方案。机械手采用交流伺服电机与气压传动相结合的方式,实现了多自由度运动与精准抓取。设计在结构紧凑性、操作便利性及维护简易性方面具有明显优势,能够有效减少苹果采摘过程中的损失。建议在实际应用中进一步优化末端执行器的抓取力度控制,以适应不同品种与成熟度的苹果。同时,可考虑引入传感器反馈系统,提升机械手对果实位置与姿态的识别能力,从而进一步提高采摘成功率与作业效率。
文档评价:
该论文结构完整,从设计背景、零部件设计到参数计算与三维建模均有覆盖,逻辑清晰。内容紧扣苹果采摘机械手的实际需求,提供了具体的结构方案与动力参数,具有较强的工程参考价值。文档语言专业,数据与设计细节详实,适合作为农业机器人领域的设计范例或教学案例。
使用建议:
读者可重点关注机械手爪的仿生结构设计思路以及交流伺服电机与气压传动的配合方式。在开展类似采摘设备研发时,可参考本文的零部件选型与动力计算方法。对于需要提升采摘自动化水平的果园管理者,该设计可作为设备选型或定制化改造的技术依据。建议结合具体果园的果树间距与果实分布情况,对机械手的臂展与抓取范围进行适应性调整。
适用人群:农业机械设计人员、机械工程专业学生、自动化采摘设备研发工程师、果园种植管理者
文档核心内容:
该论文围绕苹果采摘机械手的设计展开,提出了一种基于仿生学与人体工学原理的机械手爪方案。文档详细阐述了机械手的整体结构,包括基座、大臂、小臂、手腕等部件,并说明了其采用交流伺服电机驱动、气压辅助传动的动力方式。设计目标在于解决传统人工采摘效率低、苹果易受损的问题,实现机械手的自由伸展、多自由度转动及夹持操作。文中对关键零部件如基座、手臂、伸缩连杆、末端执行器及齿轮进行了具体设计,并提供了手臂与小车动力计算参数。最终通过三维建模展示了各级部件(一级上臂、大臂、小臂、末端执行器、伸缩连杆)及装配总图,验证了结构的合理性与紧凑性。
可解决的实际问题:
该设计可有效减少苹果采摘过程中的机械损伤,提升采摘作业的自动化水平。适用于规模化果园中替代人工进行重复性采摘工作,尤其针对需要精细抓取、避免果实挤压的作业场景。文档为农业机器人手爪的研发提供了结构参考与动力计算依据,有助于解决劳动力短缺与采收成本高的问题。
正文内容:
苹果采摘机械手的设计旨在应对传统手工采摘效率低、果实易受损的行业痛点。该研究提出了一种仿生机械手爪,通过模拟人体工学原理,使设备更符合实际采摘操作需求。机械手整体由基座、大臂、小臂、手腕等模块构成,能够完成自由伸展、多自由度转动以及夹持等动作。动力系统采用交流伺服电机驱动,配合气压传动实现小幅度的机械运动,从而保证操作的平稳性与精准度。
在结构设计方面,论文对基座、手臂、伸缩连杆、末端执行器及齿轮等关键零部件进行了详细规划。基座作为支撑基础,确保整体稳定性;手臂部分分为大臂与小臂,负责实现主要运动范围;伸缩连杆用于调节作业距离;末端执行器采用双爪齿轮结构,能够有效抓取苹果并避免损伤。驱动方式上,交流伺服电机提供主要动力,气压系统则辅助完成精细动作,这种组合兼顾了动力输出与控制的灵活性。
参数设计部分,论文对末端执行器齿轮双爪、手臂动力及小车动力进行了计算。通过力学分析,确定了各部件所需的驱动力矩与运动范围,确保机械手在作业过程中能够承受负载并保持稳定。三维建模环节展示了一级上臂、大臂、小臂、末端执行器、伸缩连杆以及装配总图,直观呈现了各部件之间的装配关系与运动逻辑。整体设计强调电路简化、维护方便、操作便捷,同时优化了机械结构,使其更加紧凑实用。
结论与建议:
该研究通过仿生设计与动力计算,成功构建了一种适用于苹果采摘的机械手方案。机械手采用交流伺服电机与气压传动相结合的方式,实现了多自由度运动与精准抓取。设计在结构紧凑性、操作便利性及维护简易性方面具有明显优势,能够有效减少苹果采摘过程中的损失。建议在实际应用中进一步优化末端执行器的抓取力度控制,以适应不同品种与成熟度的苹果。同时,可考虑引入传感器反馈系统,提升机械手对果实位置与姿态的识别能力,从而进一步提高采摘成功率与作业效率。
文档评价:
该论文结构完整,从设计背景、零部件设计到参数计算与三维建模均有覆盖,逻辑清晰。内容紧扣苹果采摘机械手的实际需求,提供了具体的结构方案与动力参数,具有较强的工程参考价值。文档语言专业,数据与设计细节详实,适合作为农业机器人领域的设计范例或教学案例。
使用建议:
读者可重点关注机械手爪的仿生结构设计思路以及交流伺服电机与气压传动的配合方式。在开展类似采摘设备研发时,可参考本文的零部件选型与动力计算方法。对于需要提升采摘自动化水平的果园管理者,该设计可作为设备选型或定制化改造的技术依据。建议结合具体果园的果树间距与果实分布情况,对机械手的臂展与抓取范围进行适应性调整。
第1页 / 共28页

第2页 / 共28页
第3页 / 共28页
第4页 / 共28页
第5页 / 共28页
第6页 / 共28页
第7页 / 共28页
试读已结束,还剩21页,您可下载完整版后进行离线阅读
付费资源
© 版权声明
文章版权归作者所有,未经允许请勿转载。
THE END








项目总承包管理组织方案-c9a0040014-docx-1.webp)

暂无评论内容