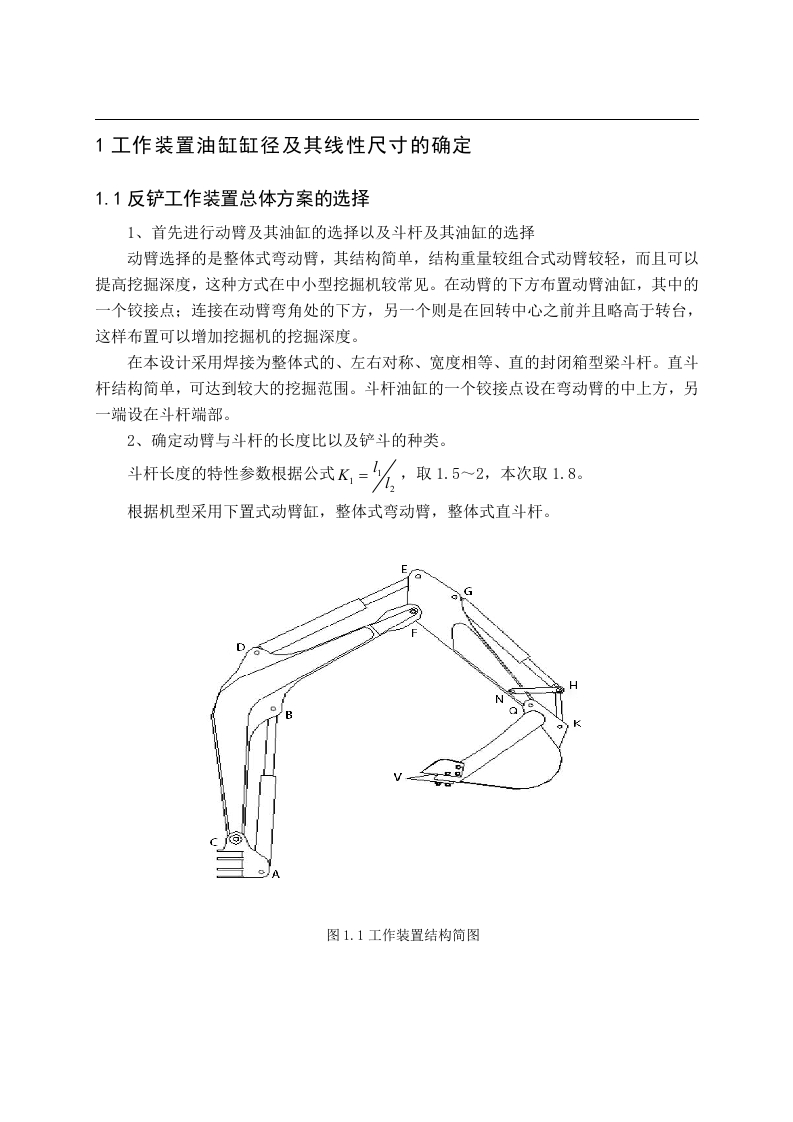
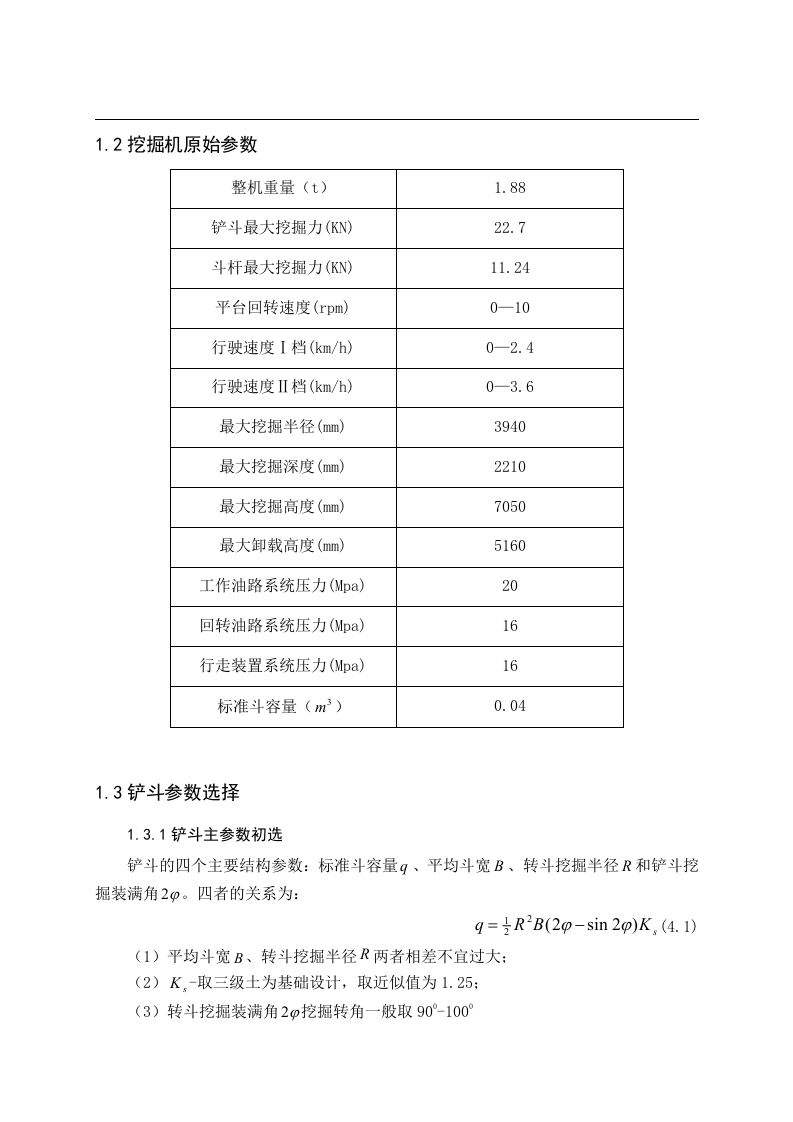
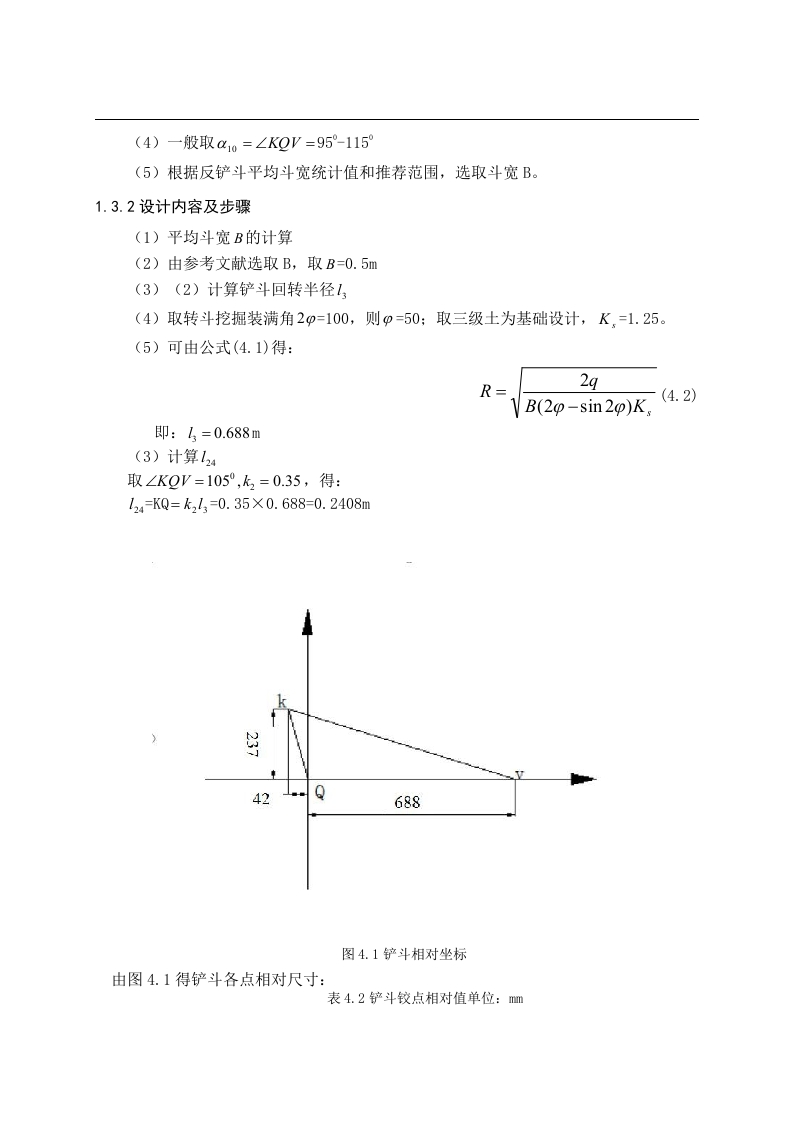
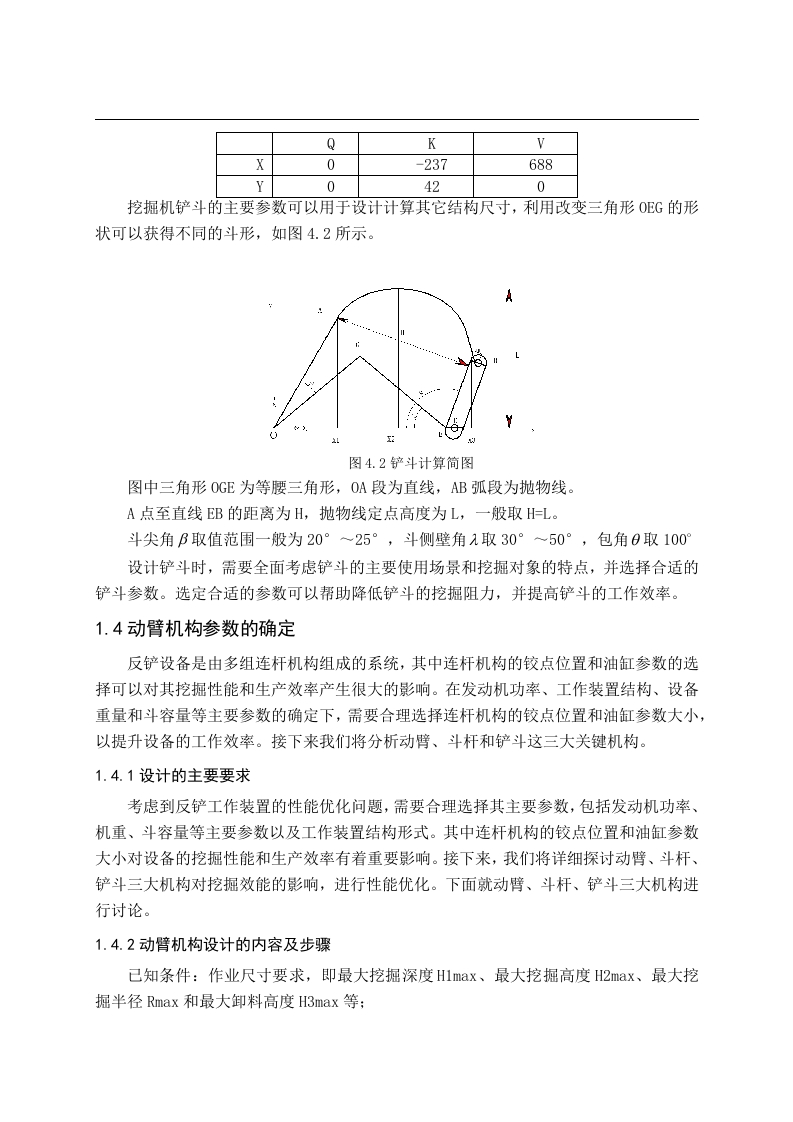
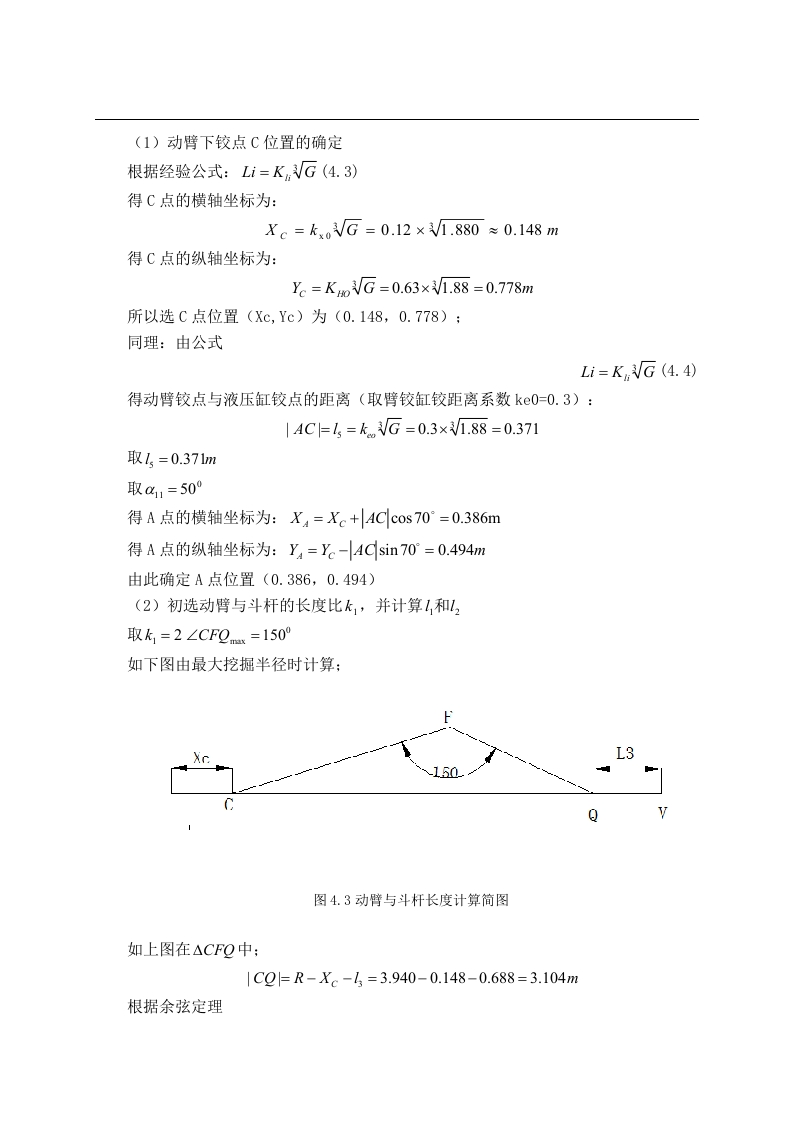
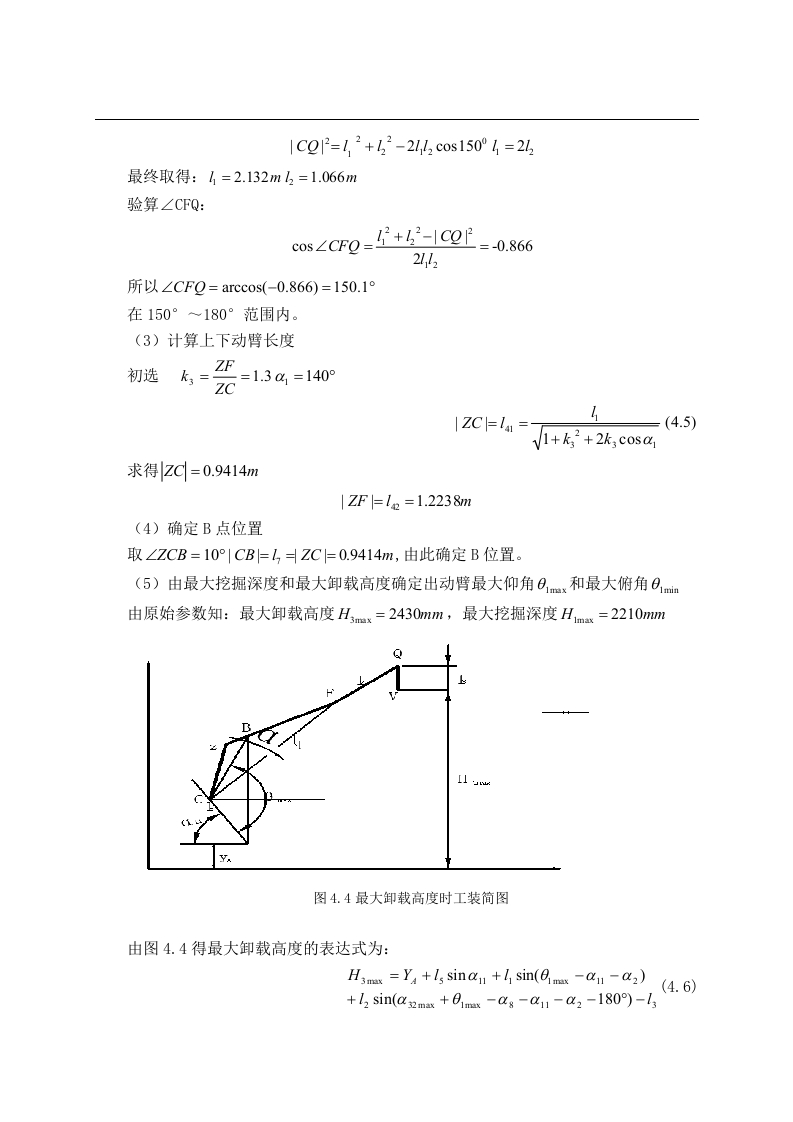
目录摘要...Abstract...........引言…1工作装置油缸缸径及其线性尺寸的确定....-21.1反铲工作装置总体方案的选择...-21.2挖掘机原始参数...-31.3铲斗主参数初选-31.4动臂机构参数的确定..-51.5斗杆机构参数的选择..101.6铲斗机构参数的选择11-1.7主要工作尺寸演算...-122挖掘力计算......132.1液压油缸闭锁力计算...-133液压挖掘机工况分析及液压系统原理图的拟定.......-213.1液压挖掘机的工况......-21-3.2挖掘机液压系统的设计要求..。-243.3液压系统基本回路的分析.....-243.4液压系统原理图及方案的制定......-304回转、行走机构主参数的确定和液压马达的选定.....·.·-314.1回转机构的选定...-31-4.2转台的转动惯量及回转启动制动力矩的计算▣-31-4.3转台转角范围及最佳转速的确定-324.4液压马达的计算选定-324.5行走装置的构造......-344.6行走液压马达的计算选择.…-344.7行走装置原地转弯能力及爬坡能力的校核0.....-375主泵、发动机和多路阀组的选型..-385.1液压系统主参数的计算☒-385.2主泵的选定39-5.3发动机功率的计算回395.4多路阀组的选用...406先导控制回路及先导阀的选用。。。416.1先导操纵的必要性..-41-6.2先导阀的选用..416.3先导油泵的选择.....-427其它辅件的计算和选择..-447.1管路的选择-447.2蓄能器的选择⑧467.3滤油器的选择477.4其它换向阀的选择.487.5油箱容量的初算...498液压缸的设计计算..-508.1缸简的受力计算508.2活塞杆稳定性的计算)53-8.3活塞的结构及于活塞杆的连接-548.4活塞杆的导向套、密封和防尘网-548.5缓冲装置的计算548.6排气阀和油口的布置...55设计总结..-56致谢.…-57-1工作装置油缸缸径及其线性尺寸的确定1.1反铲工作装置总体方案的选择1、首先进行动臂及其油缸的选择以及斗杆及其油缸的选择动臂选择的是整体式弯动臂,其结构简单,结构重量较组合式动臂较轻,而且可以提高挖掘深度,这种方式在中小型挖掘机较常见。在动臂的下方布置动臂油缸,其中的一个较接点:连接在动臂弯角处的下方,另一个则是在回转中心之前并且略高于转台,这样布置可以增加挖掘机的挖掘深度。在本设计采用焊接为整体式的、左右对称、宽度相等、直的封闭箱型梁斗杆。直斗杆结构简单,可达到较大的挖掘范围。斗杆油缸的一个较接点设在弯动臂的中上方,另一端设在斗杆端部。2、确定动臂与斗杆的长度比以及铲斗的种类。斗杆长度的特性参数根据公式K,=人,取1.5一2,本次取1.8。根据机型采用下置式动臂缸,整体式弯动臂,整体式直斗杆。GDHN图1.1工作装置结构简图1.2挖掘机原始参数整机重量(t)1.88铲斗最大挖掘力(KN)22.7斗杆最大挖掘力(KN)11.24平台回转速度(rpm)0-10行驶速度I档(km/h)0-2.4行驶速度Ⅱ档(km/h)0-3.6最大挖掘半径(mm)3940最大挖掘深度(mm)2210最大挖掘高度(mm)7050最大卸载高度(mm)5160工作油路系统压力(pa)20回转油路系统压力(pa)16行走装置系统压力(Mpa)16标准斗容量(m3)0.041.3铲斗参数选择1.3.1铲斗主参数初选铲斗的四个主要结构参数:标准斗容量g、平均斗宽B、转斗挖掘半径R和铲斗挖掘装满角20。四者的关系为:g=iR'B(2o-sin 20)K,(4.1)(1)平均斗宽B、转斗挖掘半径R两者相差不宜过大:(2)K.-取三级土为基础设计,取近似值为1.25:(3)转斗挖掘装满角2o挖掘转角一般取90°-100°(4)一般取a1。=∠K0=95°-1159(5)根据反铲斗平均斗宽统计值和推荐范围,选取斗宽B。1.3.2设计内容及步骤(1)平均斗宽B的计算(2)由参考文献选取B,取B=0.5m(3)(2)计算铲斗回转半径1(4)取转斗挖掘装满角2p=100,则p=50:取三级土为基础设计,K,=1.25。(5)可由公式(4.1)得:R=2qVB(2p-sin2p)K。(4.2)即:1=0.688m(3)计算124取∠KQV=105°,k=0.35,得:124=KQ=k2l3=0.35×0.688=0.2408m10688图4.1铲斗相对坐标由图4.1得铲斗各点相对尺寸:表4.2铲斗铰点相对值单位:mmQK0-237688Y0420挖掘机铲斗的主要参数可以用于设计计算其它结构尺寸,利用改变三角形OEG的形状可以获得不同的斗形,如图4.2所示。图4.2铲斗计算简图图中三角形OGE为等腰三角形,OA段为直线,AB弧段为抛物线。A点至直线EB的距离为H,抛物线定点高度为L,一般取=L。斗尖角B取值范围一般为20°~25°,斗侧壁角1取30°~50°,包角0取100设计铲斗时,需要全面考虑铲斗的主要使用场景和挖掘对象的特点,并选择合适的铲斗参数。选定合适的参数可以帮助降低铲斗的挖掘阻力,并提高铲斗的工作效率。1.4动臂机构参数的确定反铲设备是由多组连杆机构组成的系统,其中连杆机构的较点位置和油缸参数的选择可以对其挖掘性能和生产效率产生很大的影响。在发动机功率、工作装置结构、设备重量和斗容量等主要参数的确定下,需要合理选择连杆机构的较点位置和油缸参数大小,以提升设备的工作效率。接下来我们将分析动臂、斗杆和铲斗这三大关键机构。1.4.1设计的主要要求考虑到反铲工作装置的性能优化问题,需要合理选择其主要参数,包括发动机功率、机重、斗容量等主要参数以及工作装置结构形式。其中连杆机构的铰点位置和油缸参数大小对设备的挖掘性能和生产效率有着重要影响。接下来,我们将详细探讨动臂、斗杆、铲斗三大机构对挖掘效能的影响,进行性能优化。下面就动臂、斗杆、铲斗三大机构进行讨论。1.4.2动臂机构设计的内容及步骤已知条件:作业尺寸要求,即最大挖掘深度Hlmax、最大挖掘高度H2max、最大挖掘半径Rmax和最大卸料高度H3max等:(1)动臂下铰点C位置的确定根据经验公式:Li=KG(4.3)得C点的横轴坐标为:Xc=kx0VG=0.12×V.880≈0.148m得C点的纵轴坐标为:Yc=KoVG=0.63×V1.88=0.778m所以选C点位置(Xc,Yc)为(0.148,0.778);同理:由公式Li=KG(4.4)得动臂铰点与液压缸较点的距离(取臂铰缸铰距离系数ke0=0.3):|AC=1,=kG=0.3×1.88=0.371取l,=0.37m取a1=50°得A点的横轴坐标为:X4=Xc+ACcos70°=0.386m得A点的纵轴坐标为:Y4=Yc-ACsin70°=0.494m由此确定A点位置(0.386,0.494)(2)初选动臂与斗杆的长度比k,并计算1,和1,取k1=2∠CF0x=1509如下图由最大挖掘半径时计算;150图4.3动臂与斗杆长度计算简图如上图在△CFQ中:1C2=R-Xc-4=3.940-0.148-0.688=3.104m根据余弦定理1C02=12+422-214

















暂无评论内容