
第1页 / 共9页
第2页 / 共9页
第3页 / 共9页
第4页 / 共9页
第5页 / 共9页
第6页 / 共9页
第7页 / 共9页
第8页 / 共9页
试读已结束,还剩1页,您可下载完整版后进行离线阅读
基于扩展卡尔曼滤波的无人旋翼机组合导航控制此内容为付费资源,请付费后查看
黄金会员免费钻石会员免费
付费资源
© 版权声明
文章版权归作者所有,未经允许请勿转载。
THE END
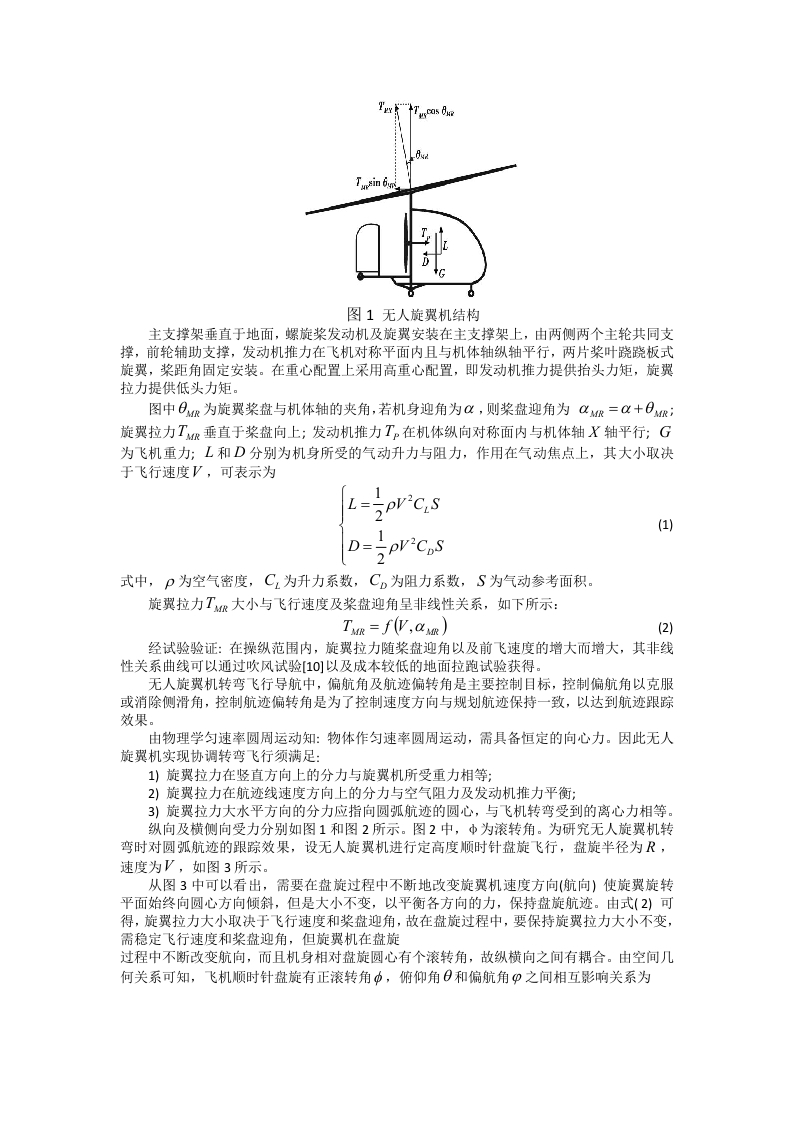
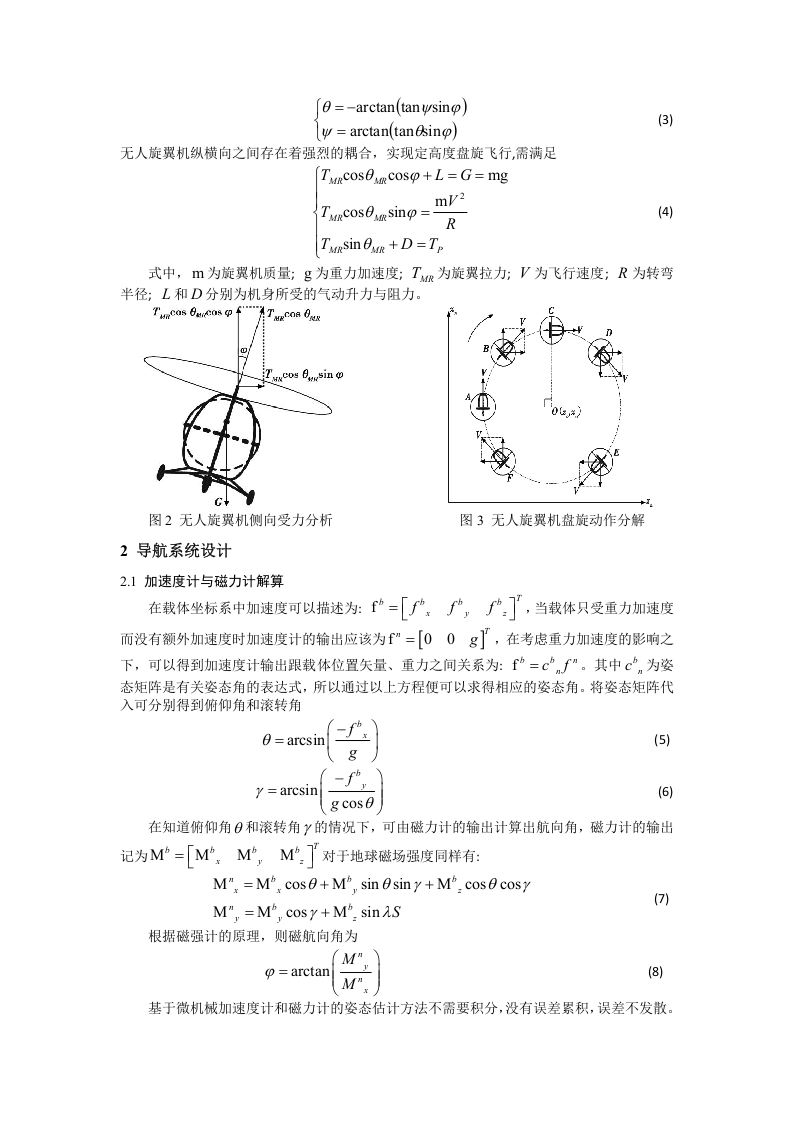
图1无人旋翼机结构主支撑架垂直于地面,螺旋桨发动机及旋翼安装在主支撑架上,由两侧两个主轮共同支撑,前轮辅助支撑,发动机推力在飞机对称平面内且与机体轴纵轴平行,两片桨叶跷跷板式旋翼,桨距角固定安装。在重心配置上采用高重心配置,即发动机推力提供抬头力矩,旋翼拉力提供低头力矩。图中日为旋翼桨盘与机体轴的夹角,若机身迎角为&,则桨盘迎角为aMR=a+BR:旋翼拉力T垂直于桨盘向上;发动机推力T在机体纵向对称面内与机体轴X轴平行;G为飞机重力:L和D分别为机身所受的气动升力与阻力,作用在气动焦点上,其大小取决于飞行速度V,可表示为L-2PV'CS(1)1D=-pVCS2式中,p为空气密度,C为升力系数,C。为阻力系数,S为气动参考面积。旋翼拉力T像大小与飞行速度及桨盘迎角呈非线性关系,如下所示:Tu=f(V,a)(2)经试验验证:在操纵范围内,旋翼拉力随桨盘迎角以及前飞速度的增大而增大,其非线性关系曲线可以通过吹风试验[10]以及成本较低的地面拉跑试验获得。无人旋翼机转弯飞行导航中,偏航角及航迹偏转角是主要控制目标,控制偏航角以克服或消除侧滑角,控制航迹偏转角是为了控制速度方向与规划航迹保持一致,以达到航迹跟踪效果。由物理学匀速率圆周运动知:物体作匀速率圆周运动,需具备恒定的向心力。因此无人旋翼机实现协调转弯飞行须满足:1)旋翼拉力在竖直方向上的分力与旋翼机所受重力相等:2)旋翼拉力在航迹线速度方向上的分力与空气阻力及发动机推力平衡:3)旋翼拉力大水平方向的分力应指向圆弧航迹的圆心,与飞机转弯受到的离心力相等。纵向及横侧向受力分别如图1和图2所示。图2中,中为滚转角。为研究无人旋翼机转弯时对圆弧航迹的跟踪效果,设无人旋翼机进行定高度顺时针盘旋飞行,盘旋半径为R,速度为V,如图3所示。从图3中可以看出,需要在盘旋过程中不断地改变旋翼机速度方向(航向)使旋翼旋转平面始终向圆心方向倾斜,但是大小不变,以平衡各方向的力,保持盘旋航迹。由式(2)可得,旋翼拉力大小取决于飞行速度和浆盘迎角,故在盘旋过程中,要保持旋翼拉力大小不变,需稳定飞行速度和桨盘迎角,但旋翼机在盘旋过程中不断改变航向,而且机身相对盘旋圆心有个滚转角,故纵横向之间有耦合。由空间几何关系可知,飞机顺时针盘旋有正滚转角中,俯仰角日和偏航角之间相互影响关系为








项目总承包管理组织方案-c9a0040014-docx-1.webp)


暂无评论内容