
第1页 / 共47页
第2页 / 共47页
第3页 / 共47页
第4页 / 共47页
第5页 / 共47页
第6页 / 共47页
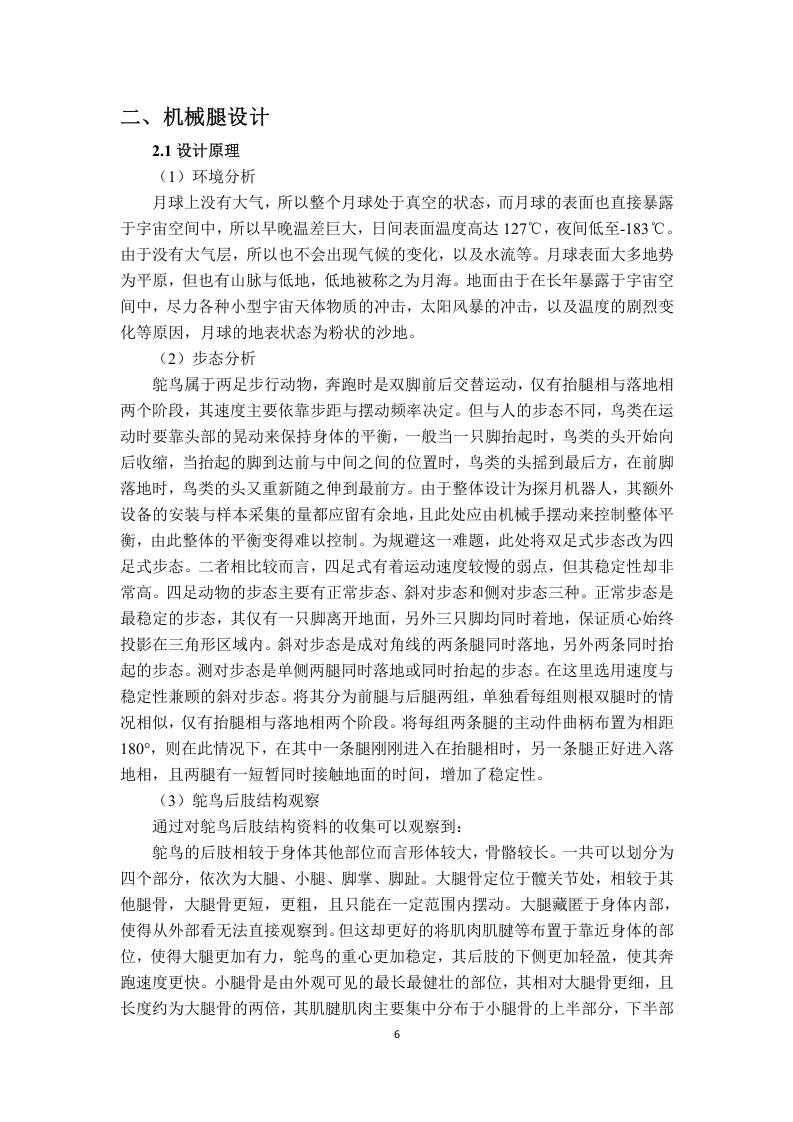
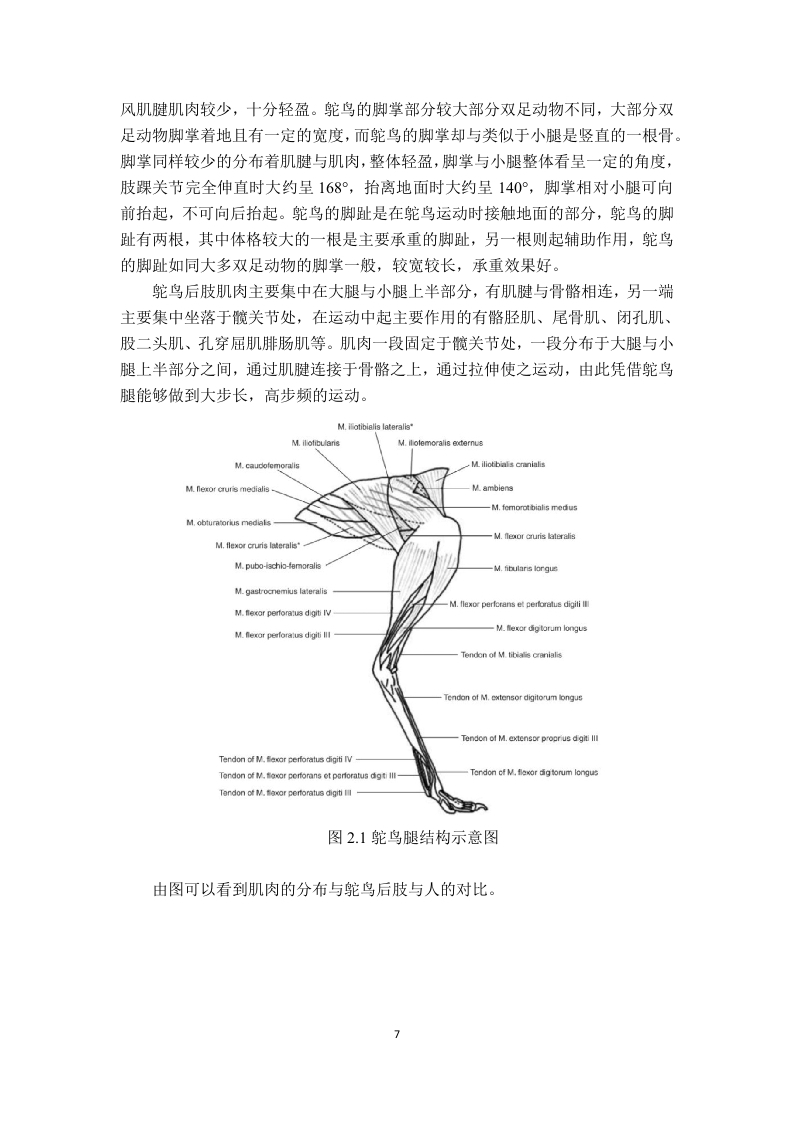
第7页 / 共47页
第8页 / 共47页
试读已结束,还剩39页,您可下载完整版后进行离线阅读
探月机器人机械腿仿生设计此内容为付费资源,请付费后查看
黄金会员免费砖石会员免费
付费资源
© 版权声明
文章版权归作者所有,未经允许请勿转载。
THE END
一、前言1.1本设计的目的、意义普通的探月车在沙地环境下的运动会收到各种地形因素的干扰,如石子、路面凹凸不平、滑沙等,导致运动速度受影响,从而使工作效率降低。希望通过本设计能够改进车轮在沙地中行动不便的状况,使得探月机器人能够拥有更高的工作效率,也能够通过仿生设计,向大自然本身进行学习,从而使经历了千百万年的自然选择而筛选出的优秀结构能过为人们所用。1.2本设计在国内外的发展概况及存在的问题人们对仿生足式机器人的研究起始于20世纪60年代,直至今日,仿生足机器人依旧是人们重点研究的对象之一。其借鉴生物退结构的特点,使足式机器人本身具备的优点更加的显著。足式机器人的研究以其速度、承载力、稳定性等为其性能指标,并根据如山地、沙漠、沼泽、城市楼道等地形特点进行特定的结构设计,使得机器人在特定的环境下拥有卓越的性能。其对地面环境的高适应性使得其能够胜任许多危险工作,如行星勘探、防护灾害、抢险救援等。双足仿生机器人多以人体为原型,使其结构更加接近于人体。日本一直在双足仿生机器人的研究领域占据着领先的地位,1973年日本早稻田大学研究出了世界上的第一个双足机器人VABOT-1,其腿部结构与人类的相似,由大腿、小腿、足三部分串联而成,能够做到抓取物体与进行距离方向的测量。又如2011年由本田公司发布的ASMO2011型机器人,能够根据指令做出相应的动作。美国也是早期进行双足机器人研究的国家之一。2008年由Boston Dynamics公司研发的PetMan,最大时速为7.lKmh,有良好的平衡稳定性,腿部拥有六个自由度,在行走的过程中能够抵御一定的外部干扰,可模仿人类的蹲起、跳跃等动作。我国对双足仿生机器人的研究始于20世纪80年代,在2000年时由国防科技大学研制出了我国的第一台双足仿生机器人“先行者”,能够实现平地静态步到动态步的转换,腿部结构也采用的串联形式。2011年浙江大学研制出的两款双足仿生机器人ZJUKONG-I及其改进型号ZJUKONG-Ⅱ,运行速度分别为8Km/h、11Kmh,具有6个自由度,可实现前进、后退、转向等动作。两代机器人足部结构都为矩形,最新研发的足部加入脚跟与脚趾的自由度,可更好地适应地面行走。鸵鸟是沙漠中最大的平胸类鸟。每步距离3.5-7米,能够以每小时50-60公1



















暂无评论内容