文档主要内容
文档类型:技术论文/研究报告
适配人群:机械工程、机器人学、虚拟样机仿真领域的研究人员、工程师及高校相关专业学生。
文档可解决的实际问题:该文档详细阐述了6PUS-UPS并联机床虚拟样机模型的构建流程,包括实体模型导入、构件属性定义、约束与驱动设置,以及基于运动学反解的滑块位移驱动方法,为并联机床的动力学仿真分析提供了可复现的技术路径。
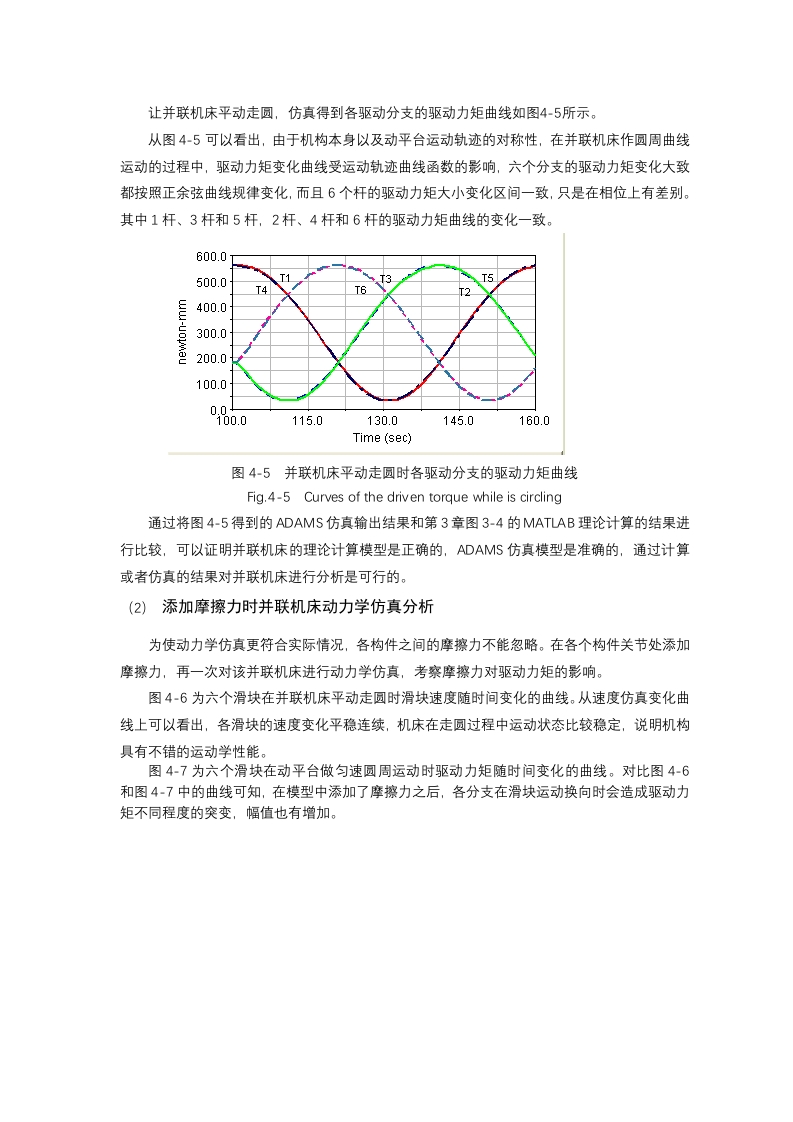
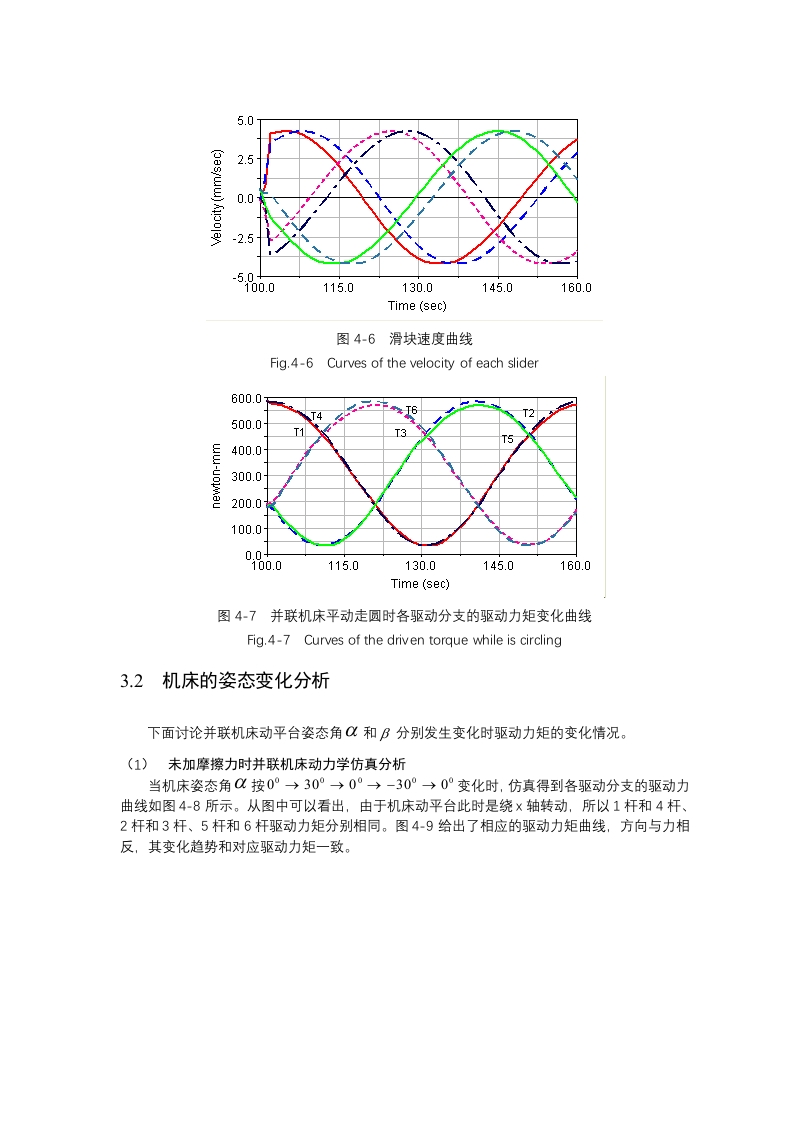
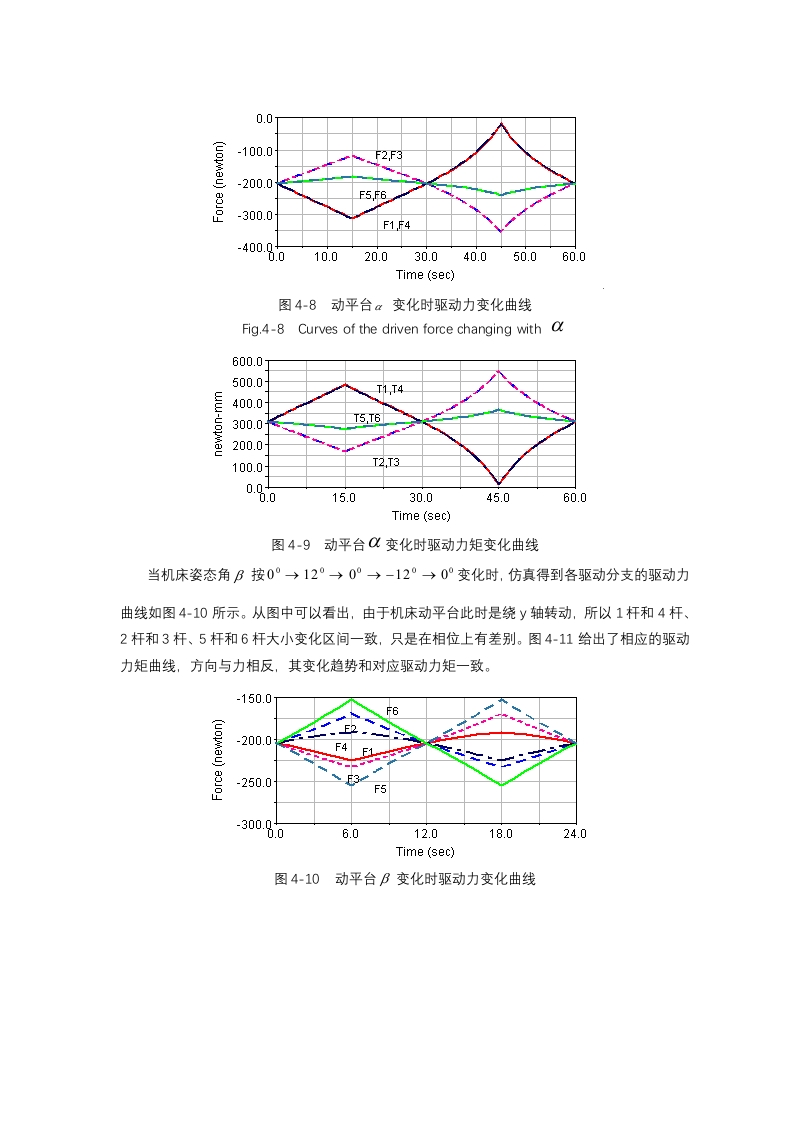
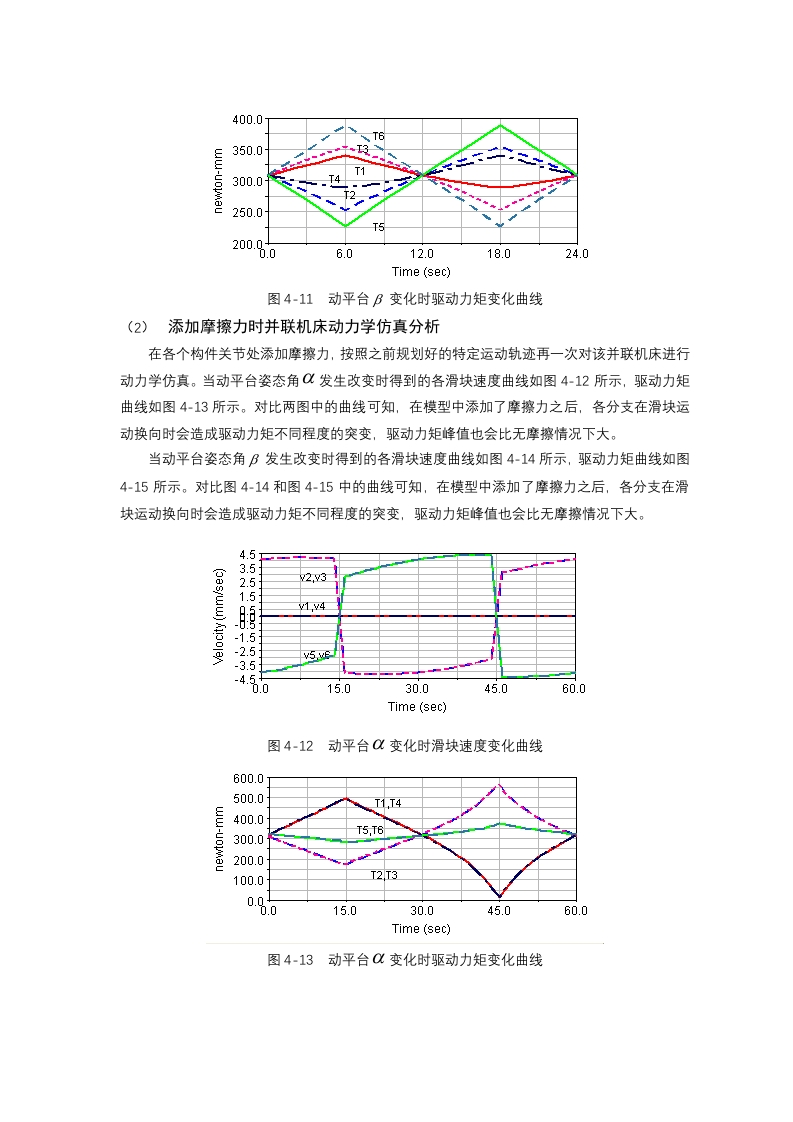
正文:
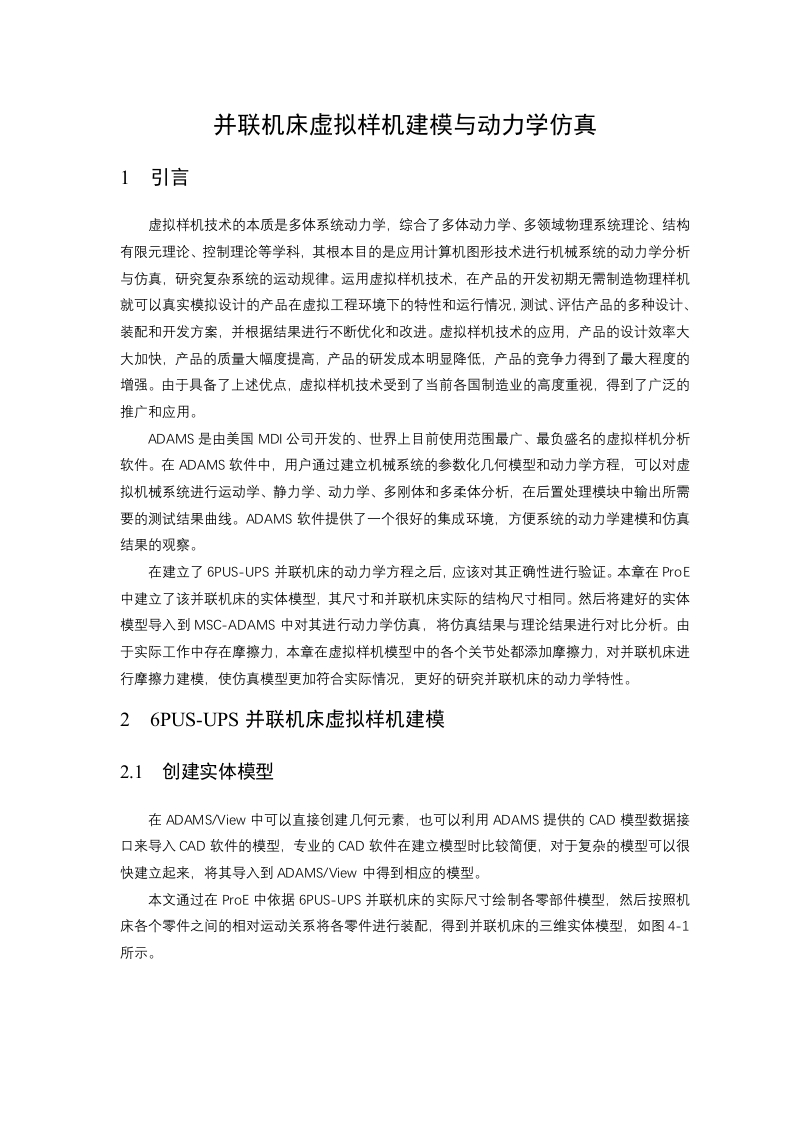
本文围绕6PUS-UPS并联机床的虚拟样机建模与动力学仿真展开,系统介绍了从三维实体模型到ADAMS仿真环境的完整转换过程。首先,将实际加工制造零部件完全吻合的三维实体模型转换为Parasolid格式,并导入ADAMS/View中,随后对各构件进行重命名并定义材料属性。该步骤确保了仿真模型与物理样机的一致性,为后续动力学分析奠定基础。
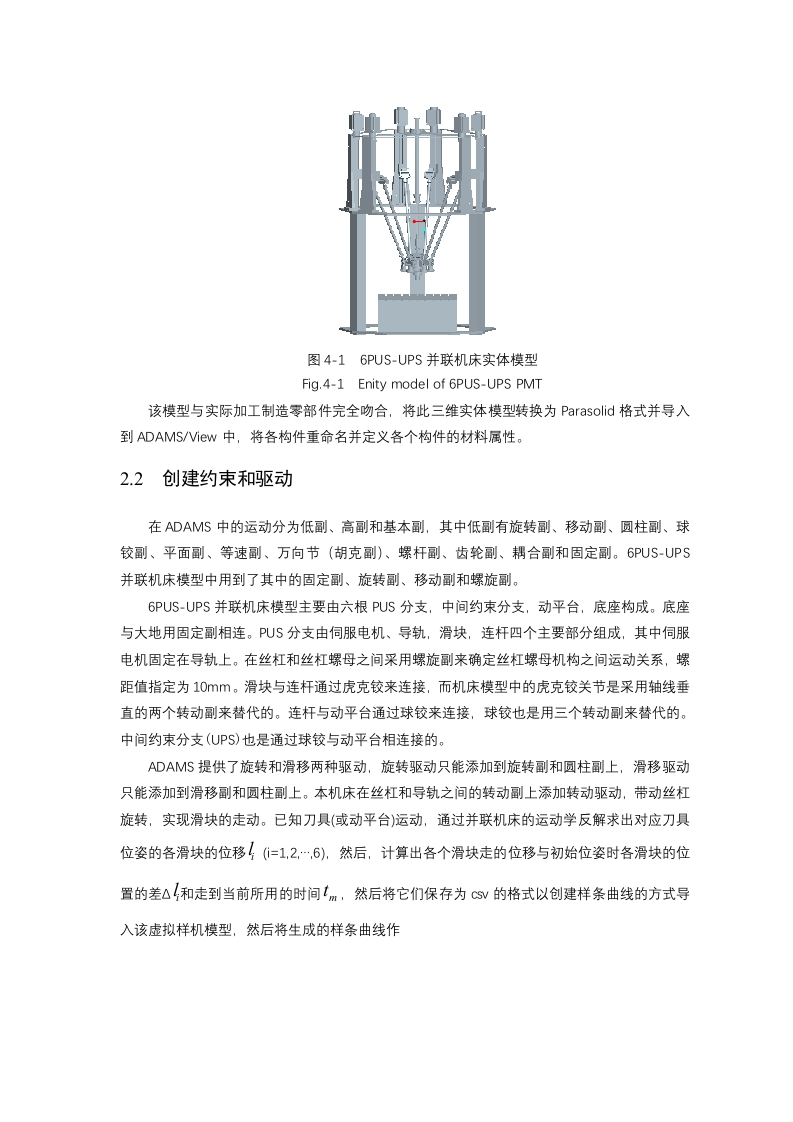
在约束与驱动创建环节,文档详细说明了ADAMS中运动副的分类与应用。6PUS-UPS并联机床模型主要采用固定副、旋转副、移动副和螺旋副。其中,底座与大地通过固定副连接;六根PUS分支由伺服电机、导轨、滑块和连杆组成,伺服电机固定在导轨上。丝杠与丝杠螺母之间采用螺旋副,螺距值指定为10mm,以精确模拟丝杠螺母机构的运动关系。滑块与连杆通过虎克铰连接,该虎克铰关节在模型中用轴线垂直的两个转动副替代;连杆与动平台通过球铰连接,球铰则用三个转动副替代。中间约束分支(UPS)同样通过球铰与动平台相连。
驱动方面,ADAMS提供旋转驱动和滑移驱动,本模型在丝杠与导轨之间的转动副上添加旋转驱动,带动丝杠旋转,从而驱动滑块移动。已知刀具(或动平台)运动轨迹后,通过并联机床的运动学反解,计算出对应刀具位姿的各滑块位移(i=1,2,…,6),进而得到各滑块位移与初始位姿的差值△以及到达当前位姿所用时间tm。这些数据以CSV格式保存,并通过创建样条曲线的方式导入虚拟样机模型,最终实现基于实际运动轨迹的仿真驱动。
该文档的核心价值在于提供了一套完整的并联机床虚拟样机建模与动力学仿真方法,尤其适用于需要精确模拟复杂运动副(如虎克铰、球铰)及螺旋副传动的研究场景。通过运动学反解与样条曲线驱动的结合,可有效验证机床的运动性能与动力学特性,为实际加工中的轨迹规划与控制策略优化提供理论支撑。







暂无评论内容