
分类
子分类
文件格式
排序
支架零件的工艺规程及钻6-Φ17孔的钻床夹具设计
本压缩包以“支架零件的工艺规程及钻6-Φ17孔的钻床夹具设计”为唯一标题,综合其字面信息,整套资料围绕支架零件的机械加工工艺规程编制以及针对钻削6个Φ17孔的专用钻床夹具设计展开。资料的...
轴向柱塞泵设计
该压缩包以“轴向柱塞泵设计”为核心主题,集合了与轴向柱塞泵结构设计、性能参数计算及工程应用相关的系列文件。从文件名判断,资料主要围绕该类型泵的总体方案、关键零部件设计、运动学与动力...
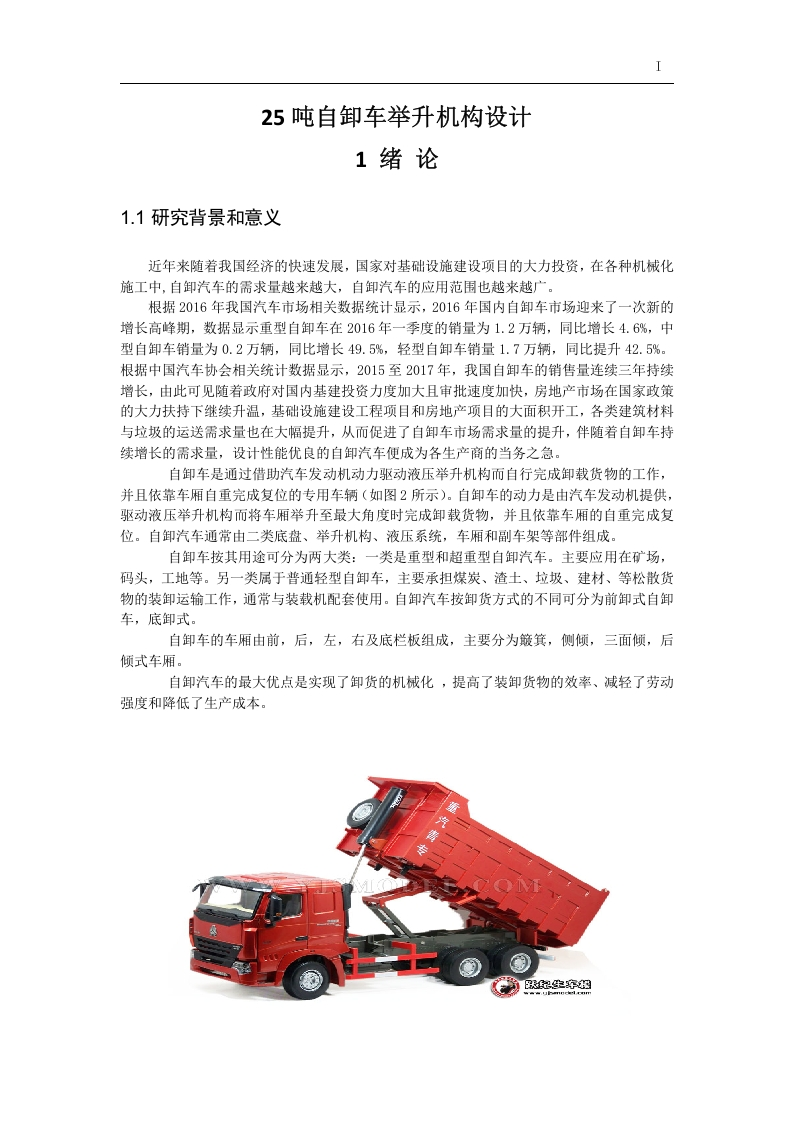
25吨自卸车举升机构设计
文档类型: 学术论文/设计报告 适用人群: 自卸车设计工程师、机械专业学生、车辆工程研究人员、物流运输企业技术管理人员 可解决的实际问题: 系统了解25吨自卸车举升机构的设计背景与市场需求...
餐具分拣装置的设计
随着我国餐饮行业快速发展,大量餐具清洗需求日益突出,传统人工分拣与清洗方式效率低下、劳动强度高,亟需自动化解决方案。本文档为论文类型,主要面向机械设计工程师、餐饮设备研发人员、高校...
导向块零件机械加工工艺设计
这是一份关于导向块零件机械加工工艺设计的本科论文,属于技术研究型论文,适合机械制造、材料成型及控制工程等专业的学生、工艺设计人员及机械加工从业者参考使用。该文档系统解决了从毛坯到成...
220kV输电线路反击故障分析及防雷保护研究
文档类型:学术论文。 适用人群:电力系统防雷设计人员、输电线路运维工程师、高电压技术研究人员、电力安全管理人员。 核心内容概述 该论文聚焦于220kV输电线路反击故障分析与防雷保护研究,以...

不同火花塞电极朝向对发动机缸内点火燃烧过程作用研究
文档类型:学术论文。 适用人群:内燃机研发工程师、发动机燃烧系统设计人员、动力机械相关专业师生。 该论文通过计算流体动力学(CFD)仿真,系统研究了不同火花塞电极朝向对缸内点火及燃烧过...
带摄像头和GPS的自行小车控制器设计
基于单片机控制的智能小车避障与循迹系统设计(论文) 适用人群:自动化、电子工程、车辆工程专业本科生及嵌入式系统开发者。 该毕业设计论文围绕自行小车控制器展开,核心采用单片机作为主控单...
风光柴储微电网系统的研究
风光柴储微电网系统是一种集风力发电、光伏发电、柴油发电机和储能装置于一体的分布式发电与配电系统,旨在解决偏远地区供电难题并提升可再生能源利用率。该文档为北京理工大学珠海学院2016届本...
