
文档主要内容
文档类型:学术论文
适用人群:军用智能车研发人员、自动驾驶算法工程师、路径规划研究者、激光雷达应用相关专业学生
文档核心价值:
本文聚焦军用智能车在复杂道路环境下的路径规划难题,针对传统方法依赖清晰车道线或相机图像失效时的局限性,提出基于激光雷达的改进方案。通过优化区域搜索算法与网格划分策略,有效提升无结构化道路中的实时路径规划能力,为军用车辆在野外、战场等非标场景下的自主行驶提供技术参考。
研究背景与问题:
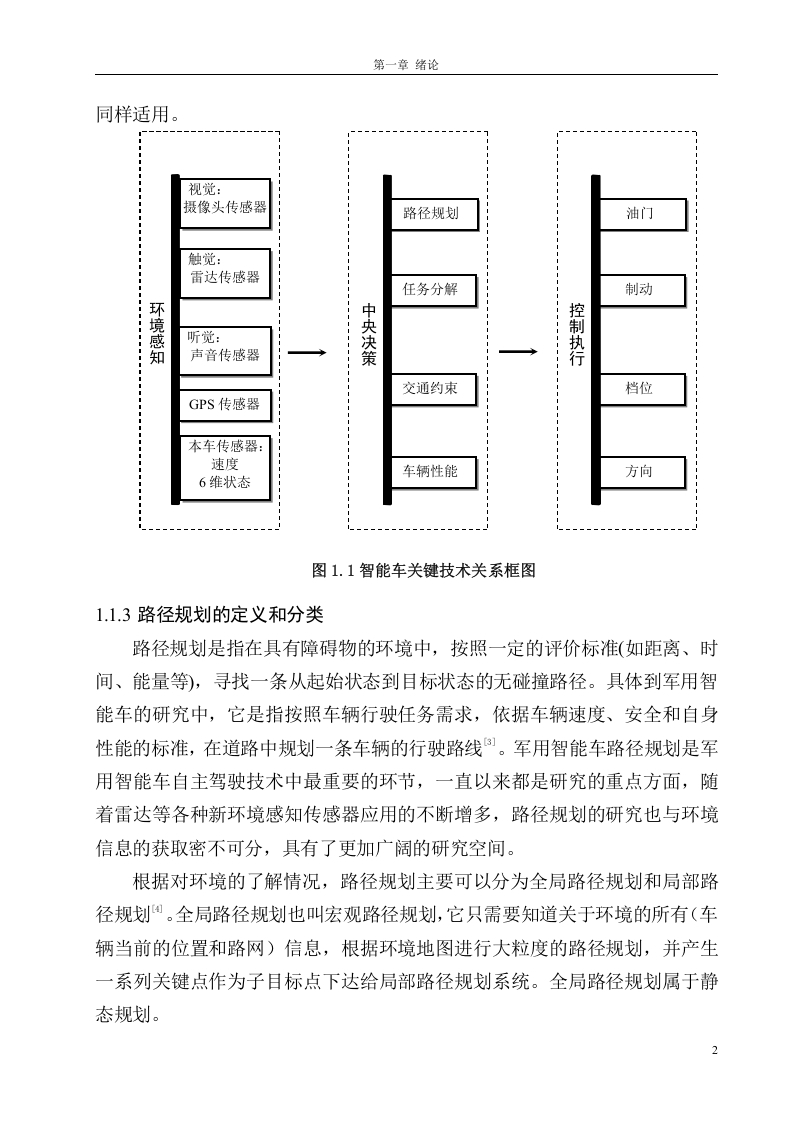
军用智能车是各国重点发展方向,但现有路径规划技术仍存在明显短板。在结构化道路中,研究人员常通过识别清晰路标或车道线获取环境信息;然而当车道线缺失或相机因光照、遮挡失效时,道路识别便陷入困境。此外,复杂道路环境与有限计算资源之间的矛盾,要求算法必须能高效区分车辆周围不同区域的信息有效性,并动态分配关注度,从而在保证关键区域规划精度的同时缩短计算时间。
核心方法与创新点:
论文首先分析了国内外主流路径规划算法,并对基于投票法的区域搜索算法进行改进。改进后的算法将激光雷达扫描数据拟合成直线以拟合道路走向,通过判断数据点是否位于该直线来识别可行区域。针对非结构化道路,论文提出变尺度网格方法,该方法重点研究网格尺寸与车辆位置、相对距离、车辆性能之间的关联,并独立推导出一套计算网格大小的实用公式。这一设计使得算法能在不同车速、不同地形下自适应调整网格分辨率,优先对近处、高风险区域进行精细建模,而对远处低风险区域采用粗粒度处理,从而显著降低计算负载。
实验与结论:
基于对比实验,该方法在无车道线场景下的道路识别准确率与实时性均优于传统方案。变尺度网格方法有效解决了计算资源与规划精度之间的平衡问题,使军用智能车能在复杂环境中快速生成安全路径。论文结论指出,该研究为激光雷达在军用智能车路径规划中的深度应用提供了可行思路,尤其适用于野外侦察、战场物资运输等缺乏固定道路标识的任务场景。
参考价值:
读者可通过本文了解如何利用激光雷达数据替代或补充视觉传感器,在恶劣环境下维持路径规划能力。文中提出的改进投票法区域搜索算法与变尺度网格尺寸计算方法可直接移植到现有智能车控制系统中,帮助研发团队缩短算法调试周期,提升系统鲁棒性。对于从事无人驾驶、机器人导航的工程人员,本文亦提供了处理非结构化道路的经典范例。







暂无评论内容