主要内容
预览文档 随着人工智能与物联网技术的深度融合,机器人正从单一执行工具向具备感知与决策能力的智能体演进。基于ESP8266的四足机器人设计,正是这一趋势下的典型实践,它通过低成本、低功耗的无线通信模块,实现了远程控制与自主避障的有机结合。该设计以ESP8266模块生成的Web服务器作为上下位机桥梁,将网络技术作为辅助手段,以机器本体为控制核心,构建了一套完整的物联网机器人系统。
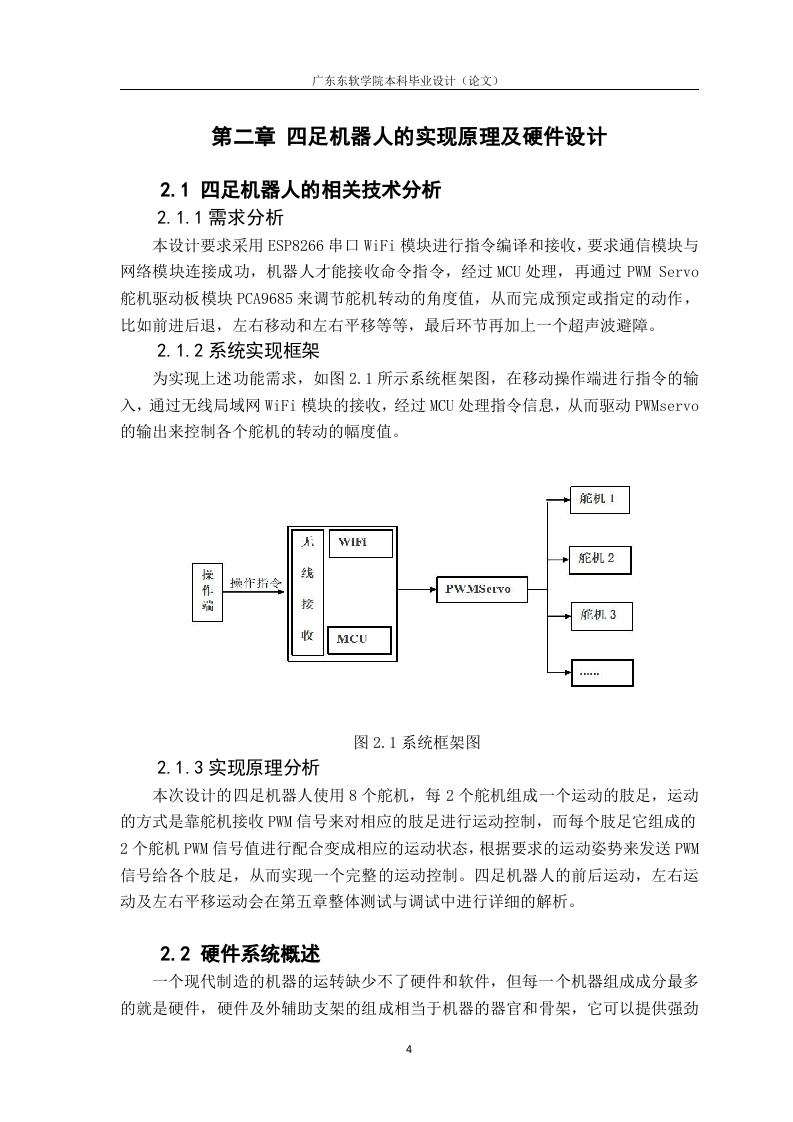
该设计首先利用ESP8266模块搭建Web服务器,使其同时承担上位机与下位机的通信中介功能。用户通过控制终端(如手机或电脑)发送指令,经Web服务器解析后传递给四足机器人的底层驱动,完成前进、转向、步态切换等基础运动控制。在此基础上,系统集成了超声波避障模块,使机器人能够实时检测前方障碍物距离,并在遇到障碍时自动调整行进方向,实现“智能避障”这一核心功能。这种设计不仅降低了开发门槛,还验证了物联网技术在低成本机器人平台上的可行性。
该文档属于论文/设计报告类型,主要面向机器人爱好者、嵌入式系统开发者以及物联网技术研究人员。它解决了如何利用ESP8266模块实现四足机器人的远程控制与自主避障这一实际问题,为相关领域的教学、实验或产品原型开发提供了可复用的技术方案。通过该设计,读者可以快速掌握Web服务器与机器人底层控制的对接方法,理解超声波传感器在动态环境中的避障逻辑,并据此拓展更多智能功能。整体而言,该设计体现了物联网与机器人技术结合的实用价值,为未来低成本智能机器人的普及提供了参考路径。
该设计首先利用ESP8266模块搭建Web服务器,使其同时承担上位机与下位机的通信中介功能。用户通过控制终端(如手机或电脑)发送指令,经Web服务器解析后传递给四足机器人的底层驱动,完成前进、转向、步态切换等基础运动控制。在此基础上,系统集成了超声波避障模块,使机器人能够实时检测前方障碍物距离,并在遇到障碍时自动调整行进方向,实现“智能避障”这一核心功能。这种设计不仅降低了开发门槛,还验证了物联网技术在低成本机器人平台上的可行性。
该文档属于论文/设计报告类型,主要面向机器人爱好者、嵌入式系统开发者以及物联网技术研究人员。它解决了如何利用ESP8266模块实现四足机器人的远程控制与自主避障这一实际问题,为相关领域的教学、实验或产品原型开发提供了可复用的技术方案。通过该设计,读者可以快速掌握Web服务器与机器人底层控制的对接方法,理解超声波传感器在动态环境中的避障逻辑,并据此拓展更多智能功能。整体而言,该设计体现了物联网与机器人技术结合的实用价值,为未来低成本智能机器人的普及提供了参考路径。
第1页 / 共39页
第2页 / 共39页
第3页 / 共39页
第4页 / 共39页
第5页 / 共39页
第6页 / 共39页
第7页 / 共39页
第8页 / 共39页
试读已结束,还剩31页,您可下载完整版后进行离线阅读
付费资源
© 版权声明
文章版权归作者所有,未经允许请勿转载。
THE END







暂无评论内容