第1页 / 共81页

第2页 / 共81页
第3页 / 共81页
第4页 / 共81页
第5页 / 共81页
第6页 / 共81页
第7页 / 共81页
第8页 / 共81页
试读已结束,还剩73页,您可下载完整版后进行离线阅读
文档主要内容
冷轧立式活套张力建模与控制研究论文解析
文档类型:专业学位论文
适配人群:冷轧带钢生产线工程师、活套控制系统研发人员、冶金自动化领域科研工作者、相关专业研究生。
文档核心内容与价值
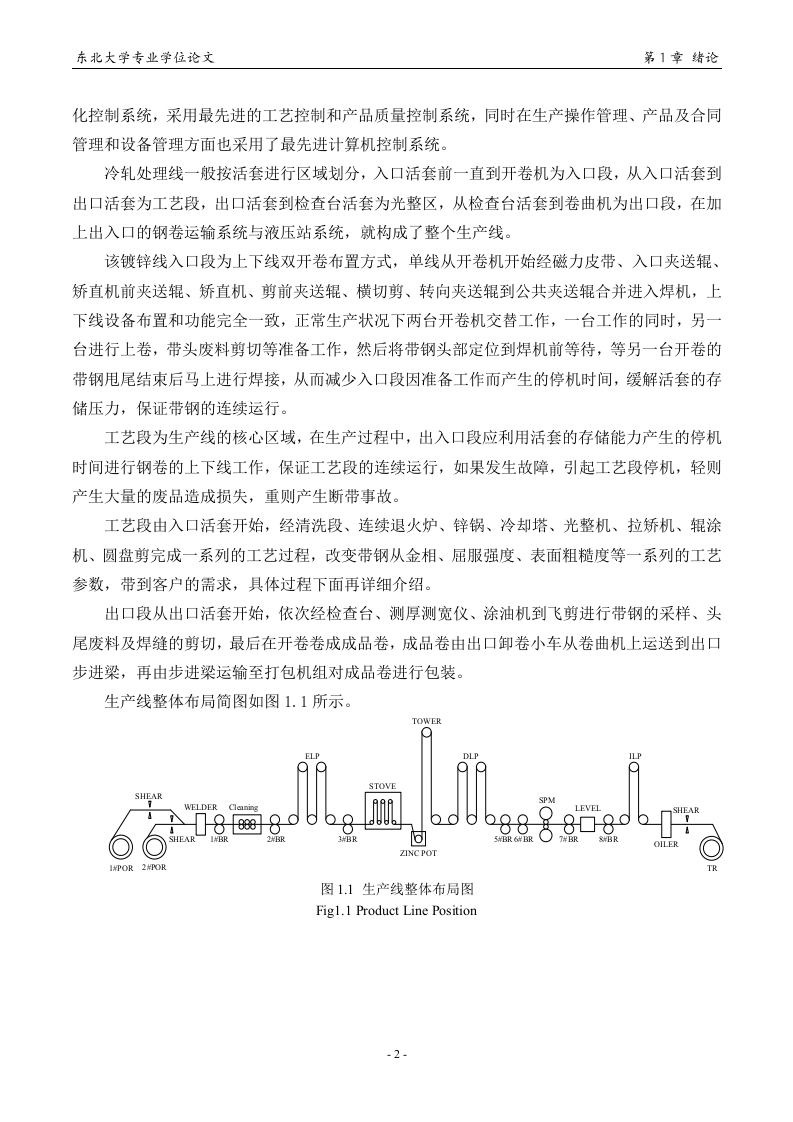
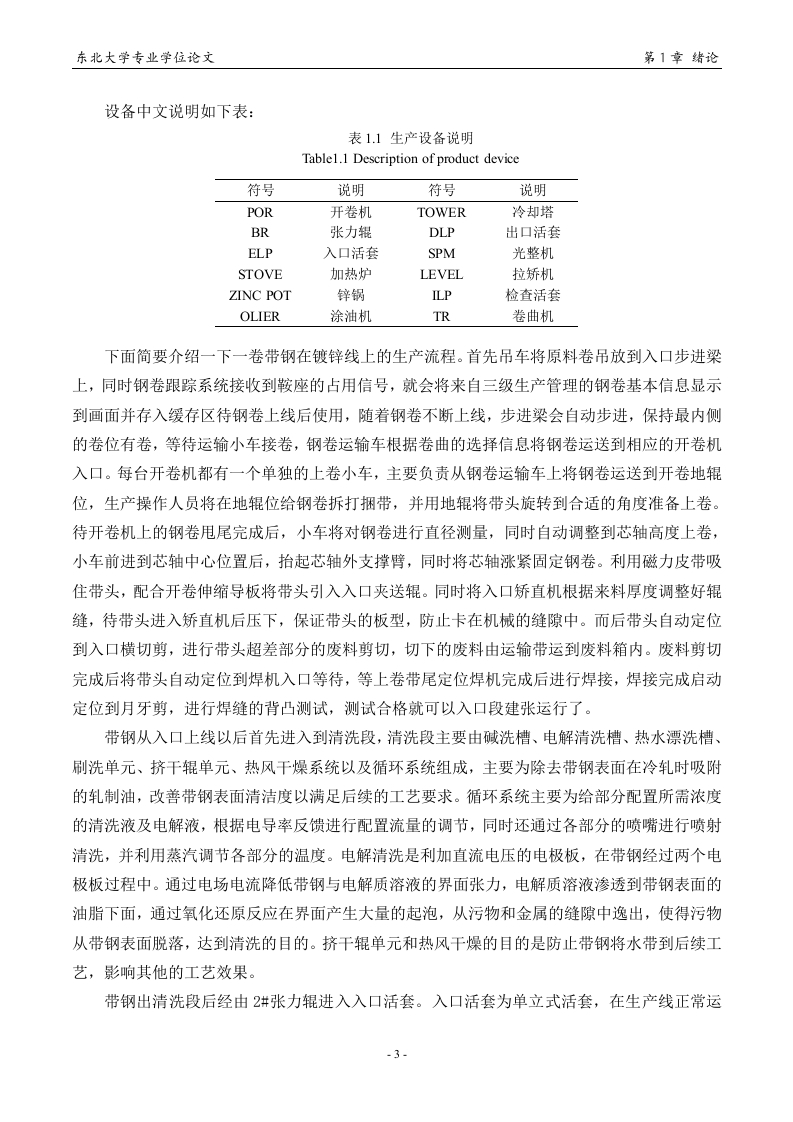
该论文以莆田连续镀锌生产线为背景,聚焦出口立式活套的控制系统研究。活套作为现代PL-TCM、CAL、CGL生产线中的关键储料设备,承担着在焊接、剪切及SPM换辊期间维持生产线连续运行的功能,其张力控制直接影响相邻区段张力调节与CPC系统性能。论文首先分析了立式活套位置控制、速度控制与张力控制之间的耦合关系,并结合现场工况,剖析了当前活套系统在同步控制中存在的问题。
为解决传统控制方法的局限,论文采用BP神经网络建立了活套系统速度与张力的数学模型,并通过验证确认该模型基本符合现场实际情况。针对常规PID控制器在时变、非线性立式活套系统中难以实现高精度控制与强鲁棒性的缺陷,论文引入单神经元自适应PID控制器,并利用MATLAB中的S函数与Simulink工具进行了跟踪性能与鲁棒性仿真实验。
关键结论与建议
通过对比分析,论文得出明确结论:采用单神经元自适应PID控制器的系统具有响应更快、稳态性能更优、超调更小的特性,同时能够适应参数变化,显著提升了活套系统的控制精度、快速性与稳定性。该研究对于提升活套控制水平与带钢质量具有重要的实际与学术价值。
文档适用场景
本论文适用于以下实际问题的解决:
冷轧连续生产线中立式活套张力控制精度不足导致的带钢质量波动;
传统PID控制器在时变非线性系统中鲁棒性差、参数整定困难;
活套同步控制中多变量耦合带来的控制难题。
读者可通过本论文掌握BP神经网络建模方法、单神经元自适应PID控制器的设计思路及仿真验证流程,为现场控制系统优化提供理论依据与参考方案。
付费资源
© 版权声明
文章版权归作者所有,未经允许请勿转载。
THE END







暂无评论内容