


文档主要内容
文档类型:学术论文/技术报告
适用人群:机械工程、机器人学领域的研究人员、高校师生及从事并联机构设计与动力学分析的工程师。
文档核心内容:
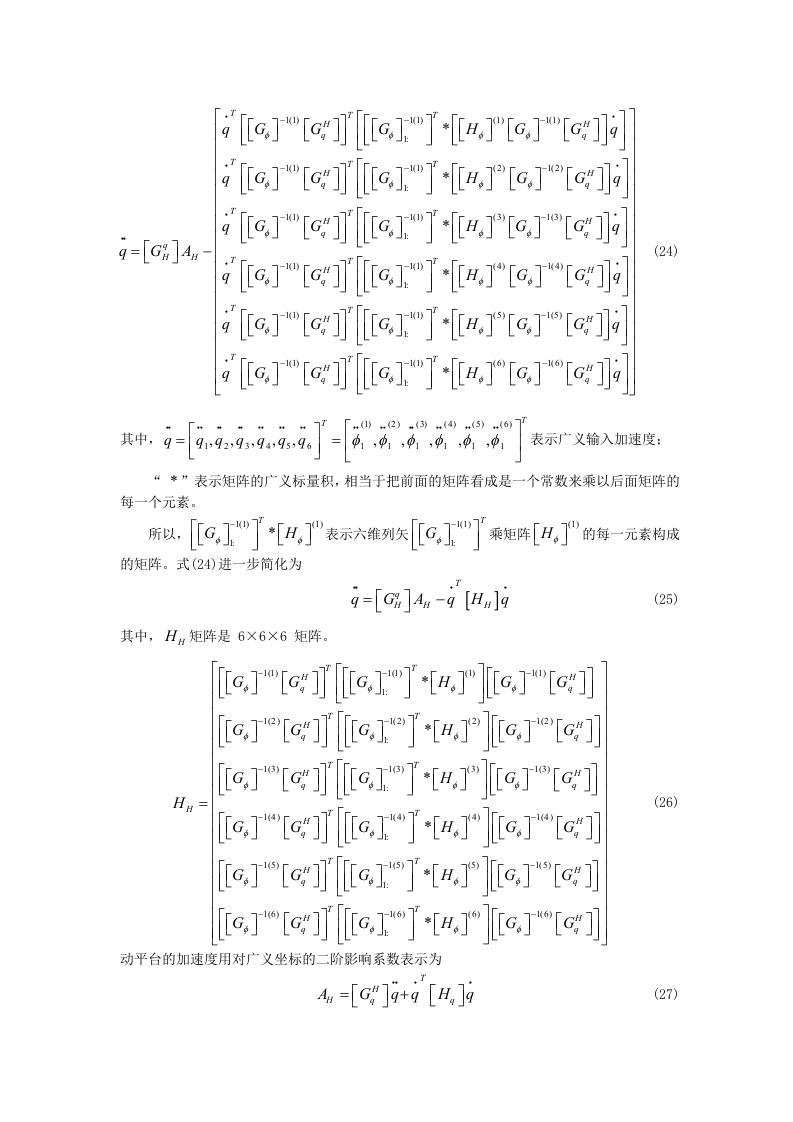
本文档聚焦于6-PUS并联机构的动力学分析,系统阐述了其支链一阶影响系数矩阵的建立方法。文档基于并联多环机器人机构的一般结构,指出该类机构由多个支链及上下平台组成,每个支链本质上是串联机构,因此并联机构支链的一阶影响系数矩阵可参照串联机构的方法构建。文档详细定义了关键参数:设单个支链各运动副轴线方向的单位矢量为S,位置向量为R,执行器末端研究点O在固定坐标系中的位置向量为P,则各运动副对O的矢径为P-R。机构影响系数矩阵分为转动影响系数矩阵和移动影响系数矩阵。支链转动的一阶影响系数定义为:当运动副为转动副且序号n≤j时,系数为S_n;其他情况为0。支链移动的一阶影响系数则根据运动副类型区分:若为转动副,系数为S_n×(P-R);若为移动副,系数为S_n;当n>j时系数为0。在此基础上,支链i的一阶综合影响系数矩阵由转动与移动系数矩阵组合而成,均为3×6矩阵,最终形成6×6的综合矩阵。针对6-PUS并联机构,文档特别指出各支链结构相似,且所有移动副仅能沿X方向移动,这一特性简化了建模过程。
文档独有作用与适用场景:
该文档为6-PUS并联机构的运动学与动力学建模提供了清晰的数学框架,尤其适用于需要精确计算支链速度、加速度及力传递关系的场景。研究人员可依据文中公式直接推导各支链的影响系数,进而分析机构在复杂运动下的动态响应。对于设计并联机床、运动模拟器或精密定位平台等工程应用,该文档提供的基础理论可直接支撑后续的刚度分析、误差补偿及控制策略设计。用户通过阅读可快速掌握一阶影响系数的核心计算逻辑,避免从零推导的繁琐过程。
核心结论与关键数据:
文档的核心结论是:6-PUS并联机构支链的一阶综合影响系数矩阵由转动与移动影响系数矩阵组合而成,其中转动影响系数矩阵G_ω与移动影响系数矩阵G_v均为3×6矩阵,综合矩阵G为6×6矩阵。关键数据包括:支链转动一阶影响系数在转动副且n≤j时为S_n;支链移动一阶影响系数在转动副时为S_n×(P-R),在移动副时为S_n。这些公式构成了机构运动学分析的基础,且由于各支链结构相似、移动副仅沿X方向运动,实际计算时可显著简化。文档未提供具体数值算例,但理论推导完整,可直接应用于后续的数值仿真或实验验证。







暂无评论内容