第1页 / 共33页
第2页 / 共33页
第3页 / 共33页
第4页 / 共33页

第5页 / 共33页
第6页 / 共33页

第7页 / 共33页
第8页 / 共33页
试读已结束,还剩25页,您可下载完整版后进行离线阅读
付费资源
© 版权声明
文章版权归作者所有,未经允许请勿转载。
THE END
文档类型:本科毕业论文
适用人群: 嵌入式系统设计人员、机器人控制方向学生、军事或警用装备研发工程师、STM32应用开发者。
文档核心价值: 针对野外复杂地形下部队行军与警用任务中的障碍清理需求,提供一套基于STM32单片机的开路清障车控制系统设计方案。该方案融合火焰传感器、超声波模块、驱动模块等外围电路,实现障碍物识别、大型障碍物火力清除、火情火焰解除等关键功能,为快速安全开辟道路提供技术参考。
背景与需求: 随着单片机技术不断优化,高性价比、强功能的芯片已广泛应用于军事科研与警用机器人领域。警用机器人虽能完成城市反恐任务,但在野外复杂地形中环境适应能力不足;军队侦察与路况探明任务繁杂,却是行军不可或缺的环节。因此,一种兼顾障碍清理与地形适应的开路清障车应运而生。
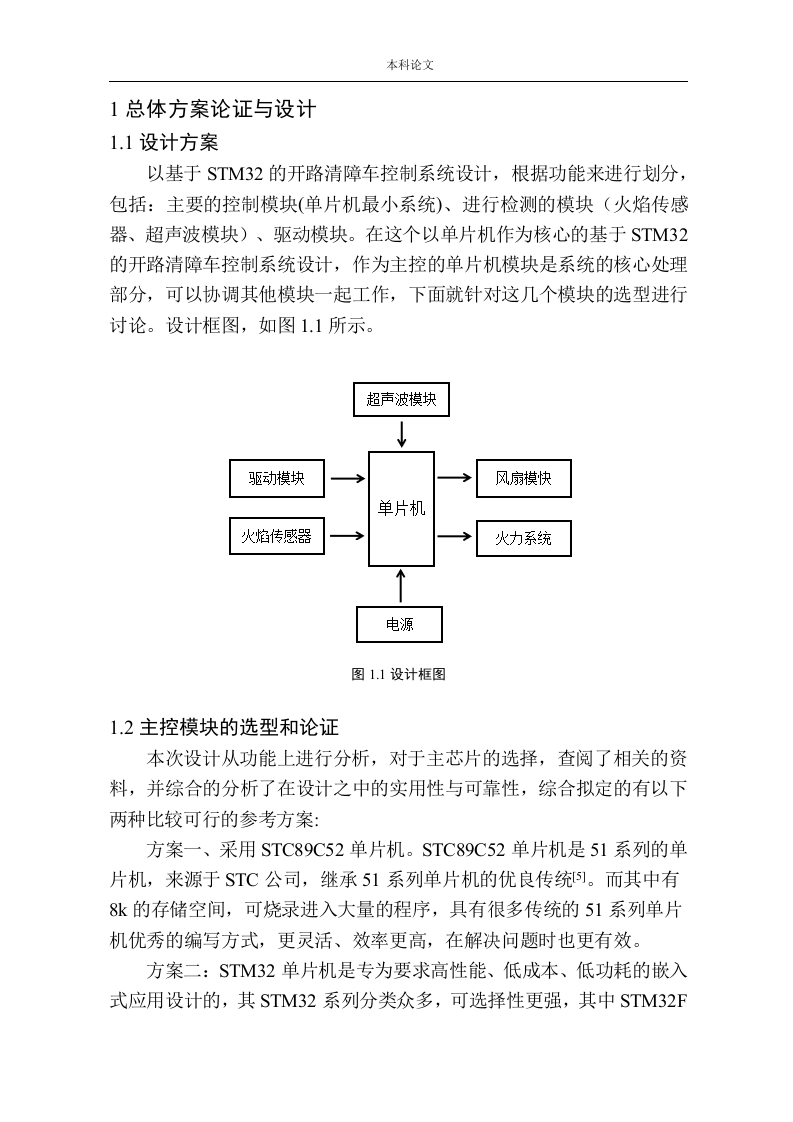
系统设计核心: 以STM32系列芯片作为主控制器,负责逻辑控制与数据处理。外围模块包括:火焰传感器用于检测火情,超声波模块用于障碍物测距与避障,驱动模块控制车辆运动。系统通过火力模块清理大型障碍物,通过火焰模块解除火情,从而降低野外行军风险。
实践验证结果: 测试表明,基于STM32的控制系统能够满足整体功能需求,火焰传感器、超声波模块、驱动模块等均实现预期工作状态,障碍物清理与火情解除功能稳定可靠。该设计为野外快速行军提供了高效、低成本的解决方案。
总结与参考价值: 本文档完整呈现了从需求分析、硬件选型到系统实现的流程,核心结论是STM32芯片可胜任开路清障车控制系统的实时性与多任务处理要求。读者可借鉴其模块化设计思路,用于同类野外机器人或特种车辆的控制系统开发,尤其适用于需要同时处理环境感知、障碍清除和火情应对的复合任务场景。







暂无评论内容