主要内容
预览文档 基于麦克风阵列的二维声音定位系统是一种能够实时检测并标记尖锐声源方向的技术方案。该文档属于工程设计报告,主要面向电子工程、嵌入式系统开发、声学定位技术研究等相关领域的学生、工程师及科研人员。文档详细阐述了一套完整的系统设计流程,从硬件搭建到算法实现,为需要开发低成本、高精度声源定位设备的读者提供了可复现的参考方案。
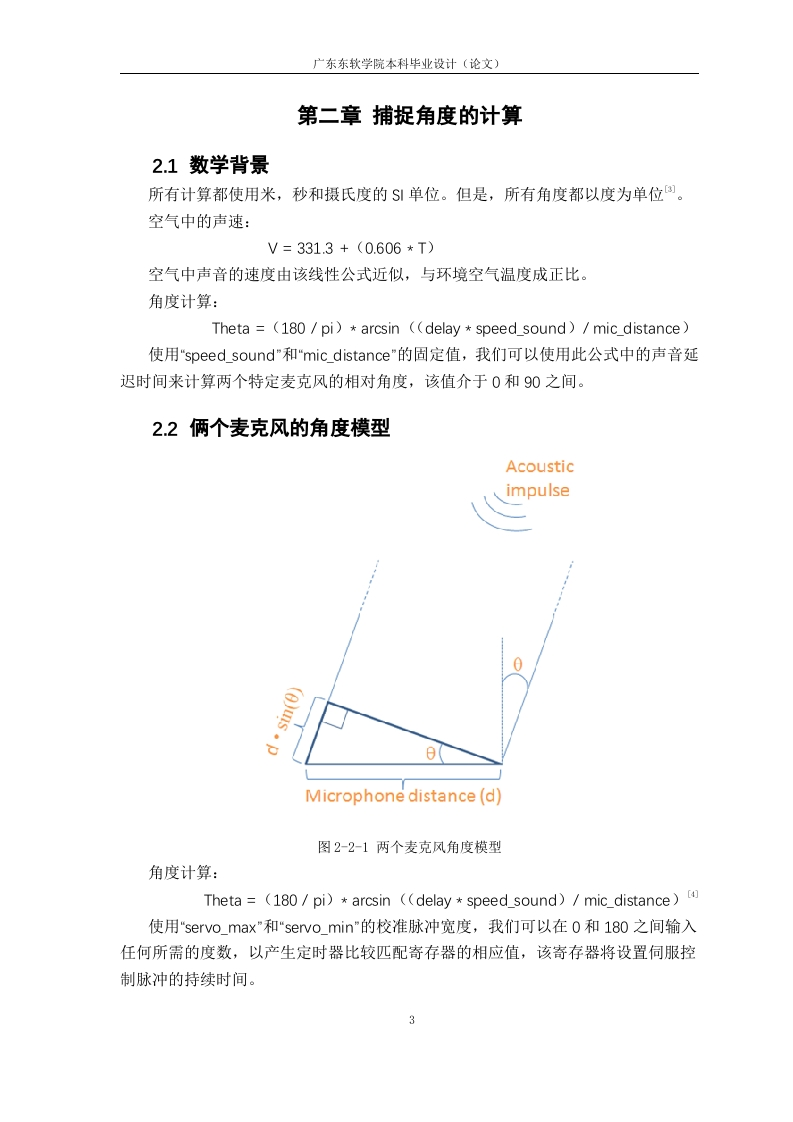
系统采用三麦克风阵列与51单片机为核心,通过检测声音到达各麦克风的时间差来计算声源方位角。麦克风信号首先经过8级模拟信号处理系统,将模拟信号转换为二进制信号,以此判断每个麦克风是否被声音触发。单片机分析三路二进制信号的触发时间顺序,自动选择其中最佳的两个麦克风用于角度计算。利用空气中声速约为340米/秒这一常数,结合麦克风间距,单片机能够精确测量微秒级的时间延迟,再通过基础三角函数推算出声音产生的角度。
该系统的关键性能指标包括360度全向覆盖和0.03度的高精度指向。最终,由中央安装的伺服电机驱动指针,自动旋转至声源方向,实现视觉标记。整个系统无需复杂的外部设备,仅依靠51单片机的定时器与中断功能即可完成时间差测量,成本低廉且易于实现。
对于需要构建二维声源定位原型、研究麦克风阵列信号处理或开发智能指向装置的用户,该文档提供了从模拟前端到数字计算再到机械执行的完整链路。读者可据此理解如何利用有限数量的麦克风(仅3个)实现远超传统方法的定位精度,并掌握将时间差测量转化为实际角度输出的数学方法。文档中未涉及复杂算法或昂贵器件,适合作为本科毕业设计、嵌入式竞赛项目或工业低成本声源标记系统的技术蓝本。
系统采用三麦克风阵列与51单片机为核心,通过检测声音到达各麦克风的时间差来计算声源方位角。麦克风信号首先经过8级模拟信号处理系统,将模拟信号转换为二进制信号,以此判断每个麦克风是否被声音触发。单片机分析三路二进制信号的触发时间顺序,自动选择其中最佳的两个麦克风用于角度计算。利用空气中声速约为340米/秒这一常数,结合麦克风间距,单片机能够精确测量微秒级的时间延迟,再通过基础三角函数推算出声音产生的角度。
该系统的关键性能指标包括360度全向覆盖和0.03度的高精度指向。最终,由中央安装的伺服电机驱动指针,自动旋转至声源方向,实现视觉标记。整个系统无需复杂的外部设备,仅依靠51单片机的定时器与中断功能即可完成时间差测量,成本低廉且易于实现。
对于需要构建二维声源定位原型、研究麦克风阵列信号处理或开发智能指向装置的用户,该文档提供了从模拟前端到数字计算再到机械执行的完整链路。读者可据此理解如何利用有限数量的麦克风(仅3个)实现远超传统方法的定位精度,并掌握将时间差测量转化为实际角度输出的数学方法。文档中未涉及复杂算法或昂贵器件,适合作为本科毕业设计、嵌入式竞赛项目或工业低成本声源标记系统的技术蓝本。
第1页 / 共32页
第2页 / 共32页
第3页 / 共32页
第4页 / 共32页
第5页 / 共32页
第6页 / 共32页
第7页 / 共32页
第8页 / 共32页
试读已结束,还剩24页,您可下载完整版后进行离线阅读
付费资源
© 版权声明
文章版权归作者所有,未经允许请勿转载。
THE END







暂无评论内容